海洋牧场无人船的推进系统设计需兼顾机动性与能源效率,根据船舶尺度与作业需求选择合适的推进方式。小型无人船多采用挂机推进,具备安装便捷、维护简单的特点;中大型无人船则倾向于采用螺旋桨推进,可提供更强劲的推力与更稳定的航行性能。推进系统的控制与船舶的转向系统协同运作,通过控制系统的算法优化,实现船舶的精细转向、定点停泊等功能。在设计过程中,还需考虑推进系统的降噪性能,避免噪音对海洋生物造成干扰,同时提升能源利用效率,延长船舶的续航时间。船舶智能化改造全自主无人艇关键技术研究创新团队获批广东省创新团队,随后到松山湖开启创业之旅。全自动海洋牧场无人船联系方式
海洋牧场无人船的交互分系统为操作人员提供了便捷的操控与监测界面,支持设备控制、状态查看、指令下达等多种操作。交互软件具备数据可视化功能,可将船舶的航行轨迹、作业数据、环境监测结果以图表形式直观展示,便于操作人员快速掌握设备状态与作业进展。同时,系统具备报警提示功能,当设备出现故障、作业参数异常或遭遇突发障碍物时,及时通过声音、灯光等方式发出警报,并推送故障信息至操作人员终端。交互分系统的人性化设计降低了操作门槛,使操作人员无需具备复杂的专业知识即可完成设备操控,提升了海洋牧场无人船的易用性。朝阳区海洋牧场无人船东莞小豚智能技术有限公司是工研院全自主无人艇省创新团队成立的产业化公司。

海洋牧场作为现代化渔业的重要载体,正逐步引入智能化设备提升管理效率,海洋牧场无人船便是其中的关键角色。这类无人船搭载多种传感器与作业装置,可按预设航线自主巡航,实时监测水温、盐度、溶解氧等水质参数,为养殖环境调控提供数据支持。在投喂环节,其精细的定位系统能确保饲料均匀撒布,减少浪费与污染。面对突发情况,如网箱破损或鱼类异常聚集,海洋牧场无人船可快速抵达现场,通过高清摄像头传回画面,助力管理人员及时处置。此外,它还能配合水下设备绘制海底地形,为牧场规划与布局提供参考,让海洋养殖从经验驱动转向数据驱动,实现生态保护与产量提升的平衡。
远程控制技术是海洋牧场无人船实现异地操控的关键支撑,其通过构建稳定的数据链路,实现岸端与船舶之间的实时指令传输与数据交互。岸端控制站的操作人员可通过交互软件查看无人船的航行状态、作业数据及周边环境影像,根据实际需求下达航行调整、作业启停等指令。远程控制模式下,船舶的油门挡位、转向操作等均由岸端远程操控,同时支持船上方向盘推杆操控作为备用模式,确保极端情况下作业的连续性。这种远程操控模式大幅降低了操作人员的海上作业风险,尤其适用于深远海海洋牧场的远距离作业场景。公司致力于研发水下机器人部件。

随着养殖业向深远海发展,海洋牧场无人船的应用场景正在不断延伸。在离岸较远的养殖区,传统人工巡检面临成本高、效率低等问题。小豚智能针对这一需求开发的远海型无人船,采用太阳能混合动力系统,续航能力明显提升,可满足连续多天的监测任务。同时,通过卫星通信技术的应用,实现了超视距远程控制,解决了移动网络覆盖不足的难题。这类无人船还可搭载水下机器人,对网箱、锚泊系统等进行多方位检测,为深远海养殖的安全运营提供有力保障。小豚智能新车间预计2022年9月正式投入使用,将建设成为公司更加完整高效的无人艇研发生产场地。浙江多功能海洋牧场无人船
公司致力于研发无人船平台。全自动海洋牧场无人船联系方式
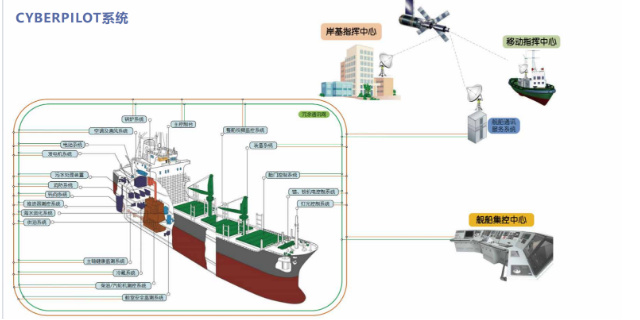
海洋牧场无人船作为智慧渔业的重要装备,其中心系统由感知、决策、控制三大模块构成,各模块协同运作保障作业的有序开展。感知系统集成雷达、激光雷达、数字照相机及北斗全球定位系统模块等设备,可精细捕捉自身位置、航速、航向等导航信息,同时对周边船舶、浮冰、漂浮物等障碍物进行多方面探测。决策系统基于感知数据完成目标检测与跟踪,结合预设作业需求生成比较好航行路线,并具备实时更新路径以实现避碰的能力。控制系统则承担手动与自动模式切换、油门挡位调节、液压转向控制等功能,支持远程遥控与自主航行两种中心操作模式,为海洋牧场各类作业提供稳定的操控支撑。全自动海洋牧场无人船联系方式