现代无人船艇的核心竞争力在于其先进的智能算法系统。通过深度学习框架训练的神经网络可以处理复杂的海洋环境数据,实现实时决策优化。在路径规划方面,改进型A*算法结合动态窗口法,使船艇能在复杂航道中计算出兼顾安全性和效率的比较好航线。环境感知系统采用多传感器数据融合技术,将激光雷达、可见光摄像头和红外传感器的信息进行加权处理,明显提升目标识别准确率。部分新型号还引入了数字孪生技术,在虚拟环境中预演任务流程,提前发现潜在风险。这些智能系统的持续迭代,使无人船艇的自主决策能力逐步接近人类水平。小豚智能作为松山湖引进的“全自主无人艇关键技术研究创新团队”孵化出来的创新型企业,亮相央视。江西多功能无人船艇技术参数
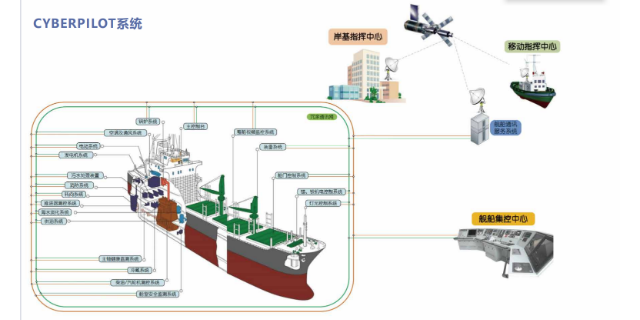
当前无人船艇的产业化进程正加速推进,但仍面临技术标准不统一、法规滞后等挑战。产业链上游以高精度传感器、复合材料船体等关键部件为主,中游涵盖整机制造与系统集成,下游延伸至运维服务与数据平台。由于行业尚处成长期,不同厂商的通信协议、数据接口存在差异,导致设备兼容性不足。法规方面,多数国家未明确无人船艇的航行权责认定标准,例如在碰撞事故中如何划分自主系统与人工干预的责任。此外,小型无人船艇的抗干扰能力有限,在强电磁环境或恶劣气象下可能失效。解决这些问题需联合科研机构、行业协会及监管部门共同制定技术规范,并开展跨领域的测试验证。安徽全自主无人船艇小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”能为船舶提供一个智能化的船舶交互和驾驶平台。

行业标准体系的完善是无人船艇产业健康发展的重要基础。目前国际海事组织(IMO)正牵头制定无人船舶安全规范,包括航行规则、避碰标准和应急程序等主要内容。在技术标准方面,IEEE组织发布了无人船艇通信协议的统一框架。我国也积极推进相关标准建设,已出台《水面无人艇通用技术要求》等多项行业标准。认证体系方面,部分船级社开始提供无人船艇的安全评估服务,涵盖结构强度、系统可靠性和网络安全等维度。这些标准工作的推进,为无人船艇的规模化商用扫清了制度障碍。
自主导航是无人船艇的主要功能之一,其依赖SLAM(同步定位与地图构建)技术实现未知水域的实时建模。通过融合GPS、惯性导航和视觉里程计数据,船艇可精确计算自身位置并动态修正轨迹。避障系统采用分层决策机制:初级避障通过规则算法(如国际海上避碰规则COLREGS)处理静态障碍;高级避障则引入机器学习模型,预测其他船舶的运动意图并生成协同路径。例如,在繁忙航道中,无人船艇可通过AIS信号识别周边船只的航向与速度,自动保持安全距离。部分先进型号还具备抗风浪能力,采用闭环控制系统调节艇身姿态,确保在4级海况下稳定航行。这些能力明显提升了无人船艇在复杂环境下的可靠性与适应性。无人船艇在海洋渔业管理中发挥着不可替代的作用。

东莞小豚智能技术有限公司旗下的无人船艇,拥有丰富且实用的功能。它集成了先进的传感器系统,能够精细地感知周围的环境信息,如水质参数、水文数据等。在水面航行时,无人船艇可利用自身搭载的高清摄像头,对水域进行多方位的监控,为相关部门提供实时的图像资料。同时,其具备强大的数据传输能力,能将采集到的各类数据迅速且稳定地传输到控制中心,方便操作人员及时分析和处理。凭借这些功能,无人船艇可以高效地完成各种复杂任务,无论是日常的水域巡查,还是特殊情况下的应急监测,它都能发挥重要作用,成为水域监测与管理的得力助手。无人船艇应用于水产资源调查,可通过声学探测评估鱼类种群数量和分布情况。北京喷水推进器无人船艇怎么样
小豚智能致力于研发无人船平台。江西多功能无人船艇技术参数
无人船艇正在推动传统渔业向智慧化方向转型。在现代化渔场管理中,小豚智能开发的渔业无人艇搭载智能投喂系统和鱼群监测设备,能够根据鱼类生长状况自动调节投喂量和频次。通过水下声呐和光学成像技术,无人艇可实时监测鱼群密度、生长速度和健康状况,为科学养殖提供数据支持。相比传统养殖方式,无人艇管理可降低约30%的饲料浪费,同时减少人工成本。在大型深水网箱养殖场,多艘无人艇可组成智能作业网络,实现对整个养殖区域的精细管控,明显提升渔业生产效率和经济效益。江西多功能无人船艇技术参数