
实现这些功能的技术中,图像处理基于AI图像处理板这一传感器。板卡具备快速图像处理识别的硬件能力,植入相应的AI算法,无人机就相当于装上了“智慧眼”,而且这个“智慧眼”居于高空,能够在一个定点,俯瞰大范围,实时监控货物的存放状态。远程控制技术基于网络通信,通过和图像处理板的结合,能够实现低延时低带宽的...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
近年来,伴随着大数据时代的来临,深度学习在计算机视觉的许多问题,如图像识别、人脸识别、目标检测领域都取得了巨大成功,与传统的目标检测算法相比,深度学习算法具有更好的表达能力、更高的准确性,深度神经网络在模型架构和学习过程上与人类认识和感知世界的神经系统类似。目标检测和识别现在是视觉方向热门的研究课题,也一直是工业界重点研究的对象。近几年,业内出现了各种各样的检测框架,不断刷新各种性能指标,然而受限于工业应用的性能与成本要求,效率-精度平衡的检测框架成为了优先。团队在该方向进行了一系列的优化设计,创建了全新的移动端实时检测框架,与其他流行的检测框架相比,该模型架构在准确性和延迟之间实现了更好的权衡,基于选用的硬件平台,可以实现性能优良的移动端实时物体检测。AI算法赋能下的图像处理板能够进行目标识别。移动目标跟踪产品
目标跟踪
随着5G快速发展,一个万物智能互联的世纪应运而生,人工智能也随着智能互联的发展充满了生机,市场对智能图像处理板的要求也越来越高。随着国内相关行业市场对图像处理板卡要求的日益提升,慧视光电推出了目前市场上基于RV1126的较小型的图像处理板卡。产品作为人工智能通用平台,用于城管、银行、边海防、电力、无人机与机器人、车辆集成等领域,快速对现有设备完成智能化升级。同时客户可根据需求自己做适配的电源板、电气接口等进行二次开发。海南国产化目标跟踪慧视RK3399PRO图像跟踪板支持目标跟踪识别目标(人、车)。

成都慧视光电技术有限公司的RK3588图像处理板同之前的RK3399pro图像处理板对比:CPU方面:3588CPU架构更先进,核心数8核(4大4小),rk3399pro只有6核(2大4小);NPU方面:rk3399pro算力3.0TOPS,rk3588算力6.0TOPS。(算力是NPU的一种评估方法,算力越高,检测帧率越高);视频输入输出接口方面:RK3399PRO支持2组MIPI-CSI输入,1组HDMI、1组MIPI-DSI输出RK3588支持1组HDMI、2组MIPI-CSI、1组DVP输入,2组HDMI、2组MIPI、1组BT1120输出;视频编解码器方面:rk3399pro支持H264,不支持H265,rk3588支持H264、H265,系统上:rk3399pro不支持RT实时系统,RK3588支持RT实时系统。
成都慧视光电技术有限公司基于国内的ARMSOC芯片解决方案商瑞芯微处理器,面向嵌入式领域推出处理模块、显控主板、工控主板等硬件解决方案,主板支持Android、Linux操作系统,支持适配国产统信和麒麟操作系统。例如RK3399处理板采用标准3.5寸嵌入式主板规范,尺寸146mm*105mm,DC12V供电。主板具有功耗低、体积小、可快速产品化的特点,可应用于机器视觉、零售管理,车载网关,工业采集网关等嵌入式行业市场。可广泛应用于机载吊舱、车载辅助、边海防监控、森林防火、电流巡检、智能周界等领域。智能图像跟踪在机场周界中的应用。

传统的监控系统需要依靠人对得到的监控视频进行分析,耗时耗力。智能监控系统可以通过目标跟踪、识别等技术自动实现对目标场景的分析和异常检测。随着深度学习在计算机视觉领域的快速发展,智能视频分析技术已经成为安防企业竞争的关键,相关技术已经达到非常高的精度。传统安防技术更多的是关注事后查证的有效性,但随着高清摄像机的普及,如何利用这些资源使设备“活”起来,已经成为越来越多安防企业发展的重点。有了视频分析,就可以及时发现视频中的异常情况,从而及时做出反应,减少损失。成都RK3588智能跟踪板提供商。黑龙江省时省力目标跟踪
成都慧视的RK3588跟踪板卡很可以。移动目标跟踪产品
YOLO算法的关键技术在YOLO算法中,有几个关键技术对其性能起着重要作用。首先是使用卷积神经网络提取图像特征,其中引入了一些先进的网络结构,如Darknet。其次是使用AnchorBox来提高目标定位的精度。此外,YOLO算法还引入了特征金字塔网络和多尺度预测等技术,以处理不同大小的目标。YOLO算法在实时目标检测和跟踪中的应用YOLO算法在实时目标检测和跟踪领域取得了明显的成果。它不仅在检测速度上远超传统方法,而且在目标定位和类别预测准确性上也表现出色。因此,YOLO算法在许多应用中得到了广泛应用,如视频监控、自动驾驶和物体识别等。移动目标跟踪产品
与目标跟踪相关的文章
低压线目标跟踪哪里买
- 多系统适配目标跟踪生产企业 2026-05-11
- 安徽低压线目标跟踪 2026-05-10
- 云南目标跟踪进货价 2026-05-10
- 海南耐用目标跟踪 2026-05-10
- 光纤数据目标跟踪批发商 2026-05-10
- 如何目标跟踪价格信息 2026-05-10
- 湖南目标跟踪参考价格 2026-05-09
- 自主可控目标跟踪性价比 2026-05-09
- 贵州目标跟踪性价比 2026-05-09
- 江西网络目标跟踪 2026-05-09
- 如何目标跟踪有哪些 2026-05-09
- 重庆目标跟踪哪里买 2026-05-09
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
福建耐用目标跟踪 2026-05-09 07:01:24SpeedDP作为一个服务型AI平台,它能提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。平台所需算法并不是固定的,使用者可以根据自身实际应用场景进行AI算法的定制化开发,例如平台经过不断的迭代,目前能够支持YOLOv8系列算法进行图像标注。Speed...
-
广西目标跟踪进货价 2026-05-08 07:01:24目标识别算法是一种深度学习算法,其聪明程度需要我们不断训练,这就得益于大量的图像标注,通过对车辆行驶环境的数据集的大量标注,能够让AI更加聪明,标注得越多,识别的精度就可能越高。但是大量的图像标注跟工作显然会耗费大量的时间精力。而慧视SpeedDP的出现很好地解决了这个问题。SpeedDP是一个深度...
-
新疆目标跟踪型号 2026-05-08 17:01:20无人机在高速公路巡检中的作用越来越突出,特别是在十一黄金周这样的出行高峰,高速公路的安全和畅通至关重要。传统的巡检模式受到人力物力以及时空的限制,弊端很大,难以实现精细大面积的监控疏导。无人机灵活机动的特点则能够很好的弥补时空的局限,而想要进一步减少人力物力的付出,则需要打造智能化的无人机,通过AI...
-
放心目标跟踪经验丰富 2026-05-08 05:01:54目标识别算法是一种深度学习算法,其聪明程度需要我们不断训练,这就得益于大量的图像标注,通过对车辆行驶环境的数据集的大量标注,能够让AI更加聪明,标注得越多,识别的精度就可能越高。但是大量的图像标注跟工作显然会耗费大量的时间精力。而慧视SpeedDP的出现很好地解决了这个问题。SpeedDP是一个深度...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

贵州可视化视频压缩与传输技术
2026-05-23 -

四川安保视频压缩与传输技术
2026-05-23 -
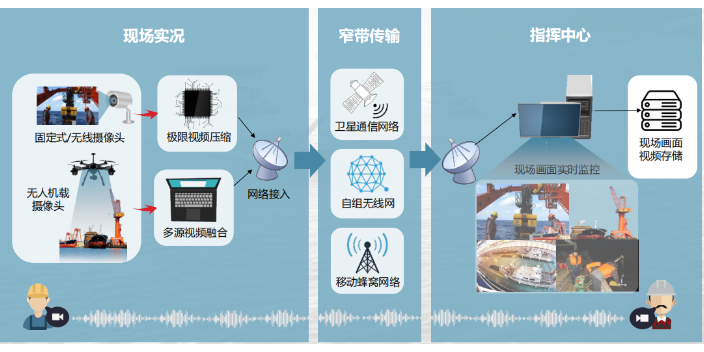
四川仓储视频压缩与传输森林
2026-05-23 -
无源图像处理板答疑解惑
2026-05-22 -

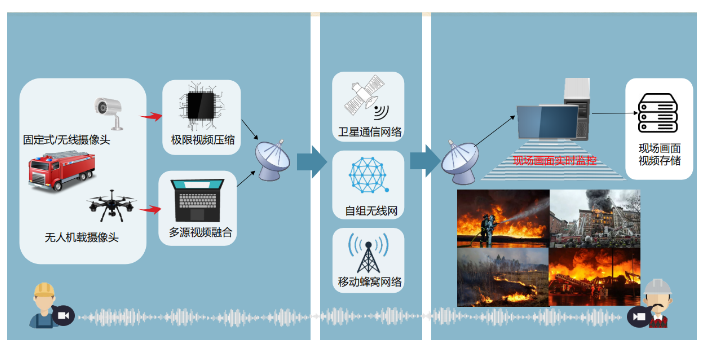
应急救援视频压缩与传输高清
2026-05-22 -
天津图像处理板价格多少
2026-05-22 -
山西高清视频压缩与传输多路
2026-05-22 -
如何图像标注技术
2026-05-22 -
河南高清视频压缩与传输森林
2026-05-22