
美国交通部下属的国家公路交通安全管理局公布了2020年度交通事故数据,显示2020年是2007年以来死亡人数极多的一年。在45%的致命事故中,乘用车司机至少有以下一种危险行为:超速、酗酒或未系安全带。这些活动取决于驾驶员的行为——喝酒、不系安全带或猛踩油门。如果您想要一个加快引入自动驾驶汽车的充分理...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
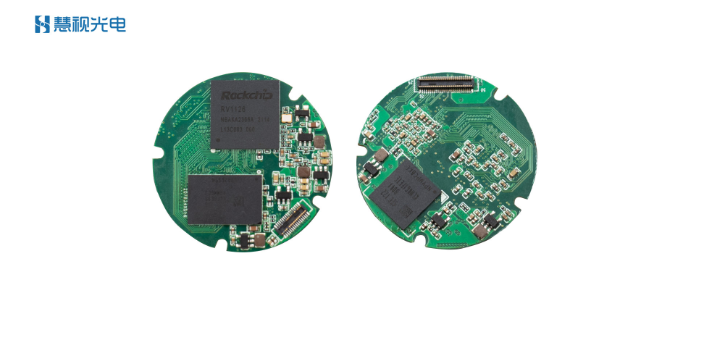
成都慧视光电的HSLi-H20VF激光雷达测量系统,是一款基于激光雷达和可视图像融合的3D测量产品。该产品基于激光雷达模块和内置高分辨率相机,可高精度,高密度,实时地生成彩色激光点云。相机模块设有变焦镜头,结合激光点云的距离信息,有利于在整个视野范围内对目标物进行变倍放大识别,提高激光雷达系统的测量准确度。机场是一个24小时都人来人往的密集聚集地,在机场内部安装慧视光电的激光雷达,可以帮助机场管理部门监测航站楼的乘客量与流动方向,帮助机场优化和预测客流量。通过传感器生成点云数据,可以高精度地创建整个大厅的3D图像,自动记录乘客活动。再加上值机大厅机器中记录的旅行数据,两者结合起来就可以为进一步完善安检点的旅客流量提供更加可靠的数据支撑。通过数据分析就能根据实际乘客流量配置值机通道,避免乘客长时间等待。慧视光电的周界型雷视融合设备怎么样?昆明250m激光雷达点云
激光雷达
激光雷达空间探测分辨率高、探测精度高、探测范围广的优点,可以有效应用于大气环境探测。利用激光雷达可以探测气溶胶、云粒子的分布、大气成分和风场的垂直廓线,还可以对主要污染源可以进行有效监控。激光雷达发出的激光可以与空气中漂浮粒子发生作用进而产生散射,并且漂浮粒子的尺度和入射光波长与为同一数量级,散射系数与波长的一次方成反比,有了这一行业数据参照,激光雷达所返回的数据就可以为我们提供气溶胶浓度、空间分布及能见度数值。西藏国内激光雷达厂家批发提高激光回波接收灵敏度的方法主要是接收机选用适当的探测方式和光电探测器。

在智慧停车领域,激光雷达能够辅助进行停车,检测车辆移动状态,控制车辆与物体之间的距离。在建模领域,激光雷达能够通过扫描获取物体的3D点云模型,例如城市建模,激光雷达系统能够提供高密度、高精度的三维数据,建筑物的三维重建比用传统方式更容易,也比手工处理更快,不要立体测量的方式获取高程信息。再例如森林检测评估,激光雷达能够扫描获取森林植被的密度、高度等信息,更快速更便捷的了解森林信息。除此之外,激光雷达还能够帮助进行海岸线的绘制、建筑物的模型绘制等。然而,激光雷达也存在一些限制,如价格高昂、较大体积和对环境中物体的反射性要求等。但尽管如此,激光雷达在各种领域的应用仍然非常多,并且随着技术的发展,激光雷达的性能和应用范围还在不断提升。
一般情况下,城市绿化的普及调查需要五年进行一次,收集城市林木、林地和城市绿地资源的种类、数量、质量与分布的数据,客观反映调查区域自然、社会经济条件和管理状况,为决策者提供数据支撑。激光雷达技术可以获取高精度遥感数据,能够进一步分析处理得到城市绿化中每棵树的位置、高度、胸径、冠幅,可以减少人工调查工作量,提高城市绿化调查的效率和准确度,节约时间和人力成本。通过对市区内公园和主要道路的行道树采用激光雷达进行扫描,获取高精度三维点云数据,并通过后台软件可以获取绿化的各项详细数据。HSLi-H20是成都慧视自主研发的一款激光雷达。具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等杰出优点,摆脱了现有市场上探测分辨率、扫描速度等技术参数不满足实际需求指标、性价比不高等现实性问题,非常适用于城市绿化的监控和测量。此时激光雷达所测到的这两种波长光信号衰减差是待测对象的吸收所致。

点云还可用于土方计算高精度激光点云,可用于构建地形三维模型,为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,极大地减少工程勘察设计中的外业工作量,缩短工作周期。此外,点云还可用于监测地质灾害通过地形三维模型的建立,可以大面积监测地形的变化,可以根据地形的变化方向及地形的变化量,作出风险评估,为预防地质灾害的发生提供依据。例如,对滑坡体地表的监测,特别是在陡坡下的道路、铁轨,以及削坡建房等容易发生滑坡地区,能够为滑坡体成因和发育趋势的推断提供重要依据。上述五个方面,只是点云数据应用的其中一部分。因为激光雷达具备着以下几个特点:全天候工作,主动获取数据;隐蔽性好,抗有源干扰能力强,且获取数据范围广;激光穿透能力强;外业工作量小;点云精度高,空间坐标信息准确。所以,激光雷达(LiDAR)获取的点云数据,往往也适用资源勘探、城市规划、农业开发、水利工程、环境监测、矿山测量、隧道测量、公路道路测量、电缆监测、海洋深水测量等各个方面。哪家公司生产的三维激光雷达效果好?贵阳毫米波激光激光雷达的应用
慧视光电生产的三维激光雷达具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等优点。昆明250m激光雷达点云
激光雷达(LiDAR)点云数据,每一个点都包含了三维坐标信息,也是我们常说的X、Y、Z三个元素,有时还包含颜色信息、反射强度信息、回波次数信息等。首先,让我们了解一下它们是如何产生的。其实,这些点是机载激光雷达向地面发射激光信号,然后收集地面反射的激光信号而来的。此后,内业通过联合解算、偏差校正,便可以计算出这些点的准确空间信息。看上去一个简单的数据获取,其实包含了较为复杂的设备结构及数据采集过程。其一,激光雷达(LiDAR)包括了激光测距系统、光学机械扫描单元、控制记录单元、全球定位系统(GlobalPositionSystem,GPS)、惯性测量系统(InertialMeasurementUnit,IMU)以及一套成像设备等。其二,机载激光雷达(LiDAR)进行采集点云数据时除了天气需要满足飞行条件外,还需要获得空域许可,提前设计航线,实地勘察。三维预览,只是点云基本的表面特征,因为每一个点云都具备空间坐标信息,因此它们都具备测量能力。两点成线,三点成面,四点成体,通过这些点,不仅可以明确了解地表空间上的某个点的坐标信息,还可以计算它们之间的长度、面积、体积、角度等信息,正好应对了测量需要的要素。昆明250m激光雷达点云
与激光雷达相关的文章

贵州面阵激光雷达厂家批发
- 贵州三位测绘激光雷达点云 2024-04-19
- 重庆固态激光雷达生产商 2024-04-19
- 昆明一体式激光雷达公司 2024-04-19
- 西藏轨道检测激光雷达标定 2024-04-18
- 贵阳轨道交通激光雷达扫描 2024-04-18
- 西藏32线激光雷达slam 2024-04-17
- 贵州机载激光雷达技术 2024-04-17
- 三维激光雷达测距 2024-04-17
- 云南三位测绘激光雷达测绘 2024-04-16
- 云南固态激光雷达商家 2024-04-16
- 成都面阵激光雷达标定 2024-04-16
- 昆明车用激光雷达应用 2024-04-16
与激光雷达相关的产品


与激光雷达相关的新闻
-
昆明地面激光雷达成像 2024-04-14 13:01:56激光雷达上车已不是什么稀罕事,作为无人驾驶汽车的“眼睛”,激光雷达的精确度直接影响到自动驾驶汽车的安全和智能化。但激光雷达不是十全十美,有时候面对一个稍微移动的“人形物体”,就很难辨别是人还是不是人,这种混淆极容易酿成事故。行业也在不断探索解决这一局限的方法。一项名为“调频连续波”(FMCW)激光雷...
-
贵州单线激光雷达传感器 2024-04-14 09:08:41在夜间视野较差时,激光雷达依旧是更佳的解决方案。夜间场景下,摄像头与人眼只能依赖车辆灯光和周围环境光,但是这会有很多视觉盲区。而激光雷达则能让这个问题迎刃而解,即便在昏暗环境下,也能提供丰富的感知信息。虽然激光雷达优势众多,但也并不是全能的,譬如雨雾等极端环境下的穿透效果始终不及毫米波雷达。我们要清...
-
云南250m激光雷达系统 2024-04-13 14:01:50那点云数据可以用来干什么?点云可用于制作数字高程模型通过对点云数据进行自动化预处理,地面滤波,结合人工编辑对激光点云进行进一步的精分类,保留地面点,剩余的地面点通过构建不规则三角网(TIN)等模型进行栅格化,可得到高精度的数字高程模型(DEM)数据,也可以转换为等高线数据。点云可用于三维建模随着激光...
-
成都汽车激光雷达企业 2024-04-13 02:02:23跨平台兼容性:Web服务基于标准的Web技术,支持跨不同平台和操作系统的访问。无论用户使用桌面电脑、平板电脑还是智能手机,只要有浏览器即可访问设备的Web界面。这种跨平台兼容性使得设备的服务更加多地覆盖到各种终端用户。实时数据交互:通过Web服务,嵌入式设备可以实时向客户端发送数据,并接收来自客户端...
与激光雷达相关的问题
新闻资讯
产品推荐
-
云南移动目标识别售价
2026-05-04 -
重庆2G信号视频压缩与传输可视化指挥
2026-05-04 -
贵州数据目标识别24小时服务
2026-05-04 -
江西稳定目标识别办公平台
2026-05-04 -
福建智能化目标识别经验丰富
2026-05-04 -
安徽可靠目标识别售价
2026-05-04 -
智能化目标识别自主可控
2026-05-04 -

江苏移动目标识别自主可控
2026-05-04 -
黑龙江移动目标识别供应商
2026-05-04