复合型机器人的优点包括:度智能化:复合型机器人采用了多种级技术,如人工智能、视觉识别和自主规划等,可以实现度自主化和智能化的操作,减少人工干预和提工作效率。多功能性:复合型机器人可以在不同的环境下执行多种任务,如搬运、装配、打磨、切割、检测等,具有度的灵活性和多功能性。精度:复合型机器人具有精度的运动和行为控制,可以实现精细的操作和精确的加工、装配等任务,提了产品质量和工作效率。安全性:复合型机器人通常具有多重安全措施,如传感器监控、防碰撞装置等,可以确保机器人的安全性,减少事故发生的可能性。提生产效率:复合型机器人可以在24小时内不间断地工作,而不需要休息和休息时间,可以提生产效率和降低生产成本。可重构性:复合型机器人通常具有可重构性和可定制性,可以根据任务的需要进行组合和重构建,实现多样化的应用和适应不同环境的需求。环保节能:复合型机器人可以在生产和运作中减少能源的浪费和环境污染,提生产的环保性和节能性。达明机器人(上海)有限公司致力于提供复合机器人,欢迎新老客户来电!江苏晶圆盒搬运复合机器人工作原理

复合机器人产品特点 搭载协作机器人和机器视觉系统,在人机混合的车间代替人工完成对物料的自动定位,自动搬运和机台的自动上下料。 复合机器人搭载协作式机械臂:六轴式机械臂,灵活操作 适用于人机混合工况:可以在接触到人的情况下停止运动,无需安全围栏,不占用厂房面积。 广角度抓取范围:支持360度抓取工装夹具。 通用性强:可搭配不同夹具适配于不同场合的自动上下料。 定位:机器视觉系统实现亳米级定。 智能电源管理:自主智能充电,7*24小时全天候运行。浙江半导体复合机器人设计达明机器人(上海)有限公司致力于提供复合机器人,有想法可以来我司。

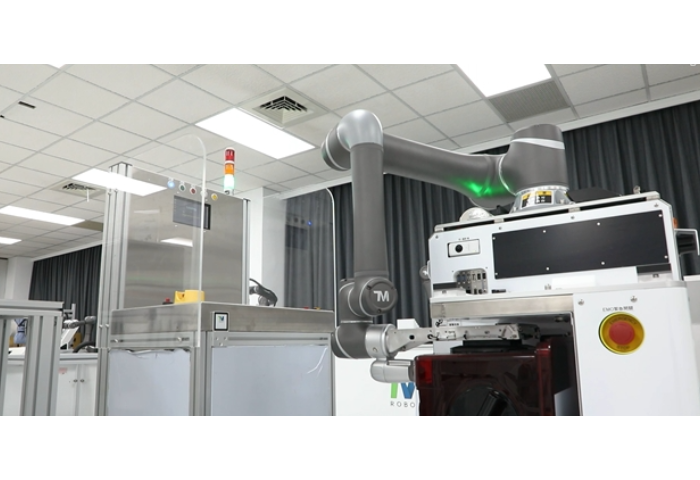
导入达明自带视觉协作机器手臂-TM12M及TM landmark ,复合机器人也可轻松应用在精精度作业站别, 并且也可以十分轻松地完成调试及复制空间定位精度±0.5mm ( AGV 定位精度±5mm ; 通过TMvision + TM Landmark,将空间定位精度做到±0.5mm以内);达明机器人通过Eye in Hand / New Base (Golden Port) 快速教点,轻松地完成调试及复制。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。
很多人认为复合机器人是AGV小车和机械臂的简单组合,其实没那么容易。米克·李梅认为AGV+机械手复合机器人的难点之一是技术,而协作机器人加AGV的配置需要开发企业同时掌握这两种技术,如何让它们协同稳定的工作也是需要攻克的难点之一。通常,复合机器人的应用场景是相当复杂的。在特定场景下,既要完成搬料、运料、取料的任务,也要加入生产线承担特定工种的加工作业。因此,复合机器人对AGV小车的环境适应性有更的要求。复合机器人以度的灵活性完成下一个过程。多个复合材料机器人形成移动装配平台,加工平台可以形成度协作。机器人和合作机器人企业抢占市场,这也是两种机器人快速增长的主要原因。要有3D激光机器视觉来分辨;当然还要让机器人多进行深度学习以提智能化,那要有AI来相助复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有想法的不要错过哦!

复合型机器人(Hybrid Robot)是一种结合了多种机器人技术的综合性机器人系统,包括机械臂、移动平台、传感器、视觉系统、人工智能、控制系统等,具有复杂的动作控制和度智能的特点,可以适应多种复杂环境,并完成多种任务。复合型机器人的应用范围非常,包括制造业、物流和仓储、医疗保健、教育和娱乐等领域。例如,复合型机器人可以用于汽车生产线上的机械加工和装配、仓库和物流中的货物运输和分拣、医疗保健中的手术和康复等。达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。达明机器人(上海)有限公司致力于提供复合机器人,欢迎您的来电!安徽上下料复合机器人模型
达明机器人(上海)有限公司是一家专业提供复合机器人的公司,有需求可以来电!江苏晶圆盒搬运复合机器人工作原理
达明机器人针对AGV/AMR搭配的复合机器人应用场景,推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。江苏晶圆盒搬运复合机器人工作原理