面向未来制造发展趋势,全自动焊接机器人工作站将继续向更高程度的数字化与集成化方向演进。通过与生产管理系统进行数据对接,焊接任务、设备状态以及生产进度能够实现统一监控,为管理决策提供依据。随着工艺数据库不断完善,企业可以在新产品导入阶段快速调用相似焊接方案,缩短试制周期。焊接工作站在这一过程中不仅承担...
全自动焊接机器人工作站基本参数
- 品牌
- ABB,发那科,库卡,新时达
- 型号
- IRB6710
- 电压
- 380
- 产地
- 广东佛山
- 厂家
- 广东利迅达机器人系统股份有限公司
全自动焊接机器人工作站企业商机
面向未来制造发展趋势,全自动焊接机器人工作站将继续向更高程度的数字化与集成化方向演进。通过与生产管理系统进行数据对接,焊接任务、设备状态以及生产进度能够实现统一监控,为管理决策提供依据。随着工艺数据库不断完善,企业可以在新产品导入阶段快速调用相似焊接方案,缩短试制周期。焊接工作站在这一过程中不仅承担加工功能,也逐渐成为生产数据的重要来源节点。通过持续优化与升级,自动化焊接体系将具备更强的适应能力,为企业构建稳定、高效且可持续扩展的制造平台提供支撑。机器人与变位机协同动作,保证焊接姿态始终处于较优区间。济南全自动焊接机器人工作站产品介绍

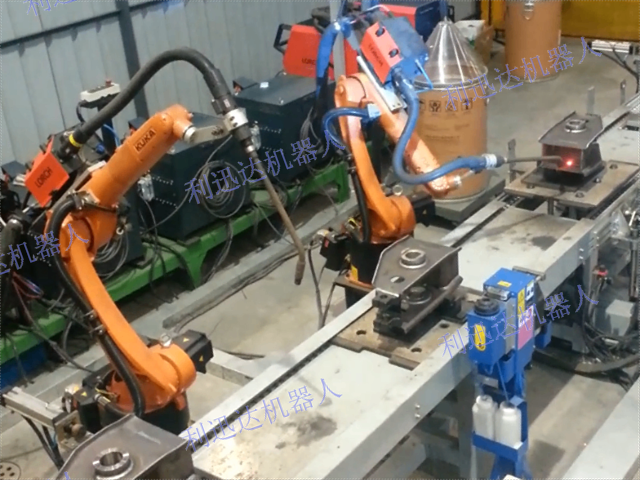
全自动焊接机器人工作站是一种集工业机器人、本体控制系统、焊接电源、送丝机构、工装夹具以及安全防护单元于一体的自动化制造单元,主要用于实现批量化、稳定化的焊接生产。通过示教编程或离线编程的方式,机器人能够按照预设轨迹完成起弧、收弧、摆动、分层焊接等一系列标准动作,从而保证焊缝成形的一致性。相比传统人工焊接模式,自动化工作站更强调节拍稳定与工艺可复制性,能够在长时间连续运行中保持相对稳定的质量输出。同时系统可记录焊接电流、电压、焊接速度等关键参数,为后续质量追溯与工艺优化提供数据支撑,适用于机架结构件、支撑件以及批量订单较为稳定的制造场景。天津工业全自动焊接机器人工作站设备价钱力控与弧长跟踪技术提升对装配误差的适应能力与焊缝一致性。

从系统集成角度来看,全自动焊接机器人工作站是一项高度综合性的工程,其成功运行依赖于机械结构、电气控制、焊接工艺以及现场管理多方面的协同配合。机器人本体的运动精度只是基础,更重要的是如何通过合理的系统架构,将焊接电源、送丝系统、变位装置和安全模块有机整合。在实际应用中,工程人员会针对工件焊缝分布特点,对机器人工作空间进行反复验证,确保在极限姿态下仍具备足够的运动余量。与此同时,焊接参数的稳定输出需要与机器人运动节奏高度匹配,避免因参数响应滞后导致焊缝不连续或成形波动。正是这种对系统整体性的高度重视,使全自动焊接机器人工作站能够在长期运行中保持稳定表现,而非*在短期试运行阶段达到理想效果。
在焊接质量追溯方面,全自动焊接机器人工作站能够通过记录关键工艺参数,为后续分析提供依据。焊接电流、电压、速度以及焊接时间等信息可在系统中进行存储,形成可查询的历史记录。当出现个别产品焊缝异常时,技术人员可以通过对比不同批次参数变化,快速判断可能的影响因素,缩短排查周期。随着数据积累的增加,企业能够逐步建立适合自身产品结构的焊接参数库,为新项目导入提供参考。数据化管理不仅提高了问题定位效率,也使焊接工艺优化具备连续性,避免每次调整都从零开始。结合数字孪生仿真提前评估节拍,优化设备与人员配置方案.
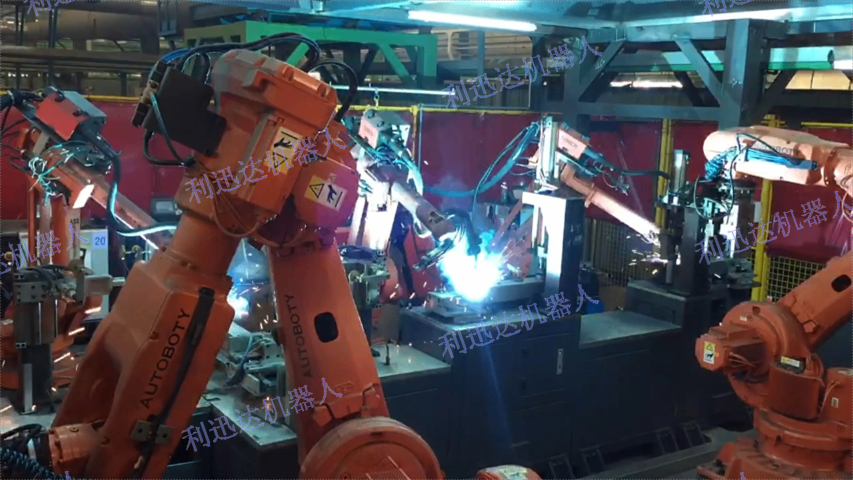
全自动焊接机器人工作站在连续生产环境下能够展现出较强的节拍稳定性。通过预先设定焊接顺序与动作节奏,系统可在长时间运行中保持一致的作业周期,避免因人工操作差异导致的时间波动。许多生产场景会采用双工位或循环工位结构,当一侧进行焊接作业时,另一侧同步完成工件装夹与准备工作,使机器人利用率得到提升。与此同时,焊接程序可根据不同型号产品进行调用与切换,减少换线准备时间。稳定的节拍管理不仅有助于提升产线整体产能,也便于企业进行生产计划排程,使订单交付更加可控。智能控制柜统一管理各类信号,保障工作站长期稳定连续运行。惠州定做全自动焊接机器人工作站售后服务
视觉识别辅助定位工件姿态,减少人工干预并提升装夹准确度。济南全自动焊接机器人工作站产品介绍
在现代制造车间中,全自动焊接机器人工作站通常与变位机或回转工作台配合使用,通过改变工件姿态,使焊缝始终处于较为理想的焊接位置,从而提升焊接成形质量并减少飞溅。该结构还可以实现双工位节拍模式,一侧进行焊接作业,另一侧进行上下料准备,有效减少等待时间。系统通过标准化夹具定位,使每次装夹后的工件位置保持一致,降低人为装配误差对焊接质量的影响。对于需要多道焊或长焊缝的产品,机器人可按照既定路径连续作业,焊缝衔接更加平滑,有助于减少后续打磨与修整工序的工作量。济南全自动焊接机器人工作站产品介绍
广东利迅达机器人系统股份有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在广东省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,广东利迅达机器人系统股份供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
与全自动焊接机器人工作站相关的文章
济南全自动焊接机器人工作站产品介绍
- 茂名定做全自动焊接机器人工作站方案 2026-05-02
- 天津定做全自动焊接机器人工作站生产厂家 2026-04-30
- 江门一体化全自动焊接机器人工作站维保 2026-04-28
- 玉林通用全自动焊接机器人工作站降价 2026-04-27
- 深圳定做全自动焊接机器人工作站售后服务 2026-04-27
- 河北定做全自动焊接机器人工作站保养 2026-04-26
- 桂林自动化全自动焊接机器人工作站 2026-04-25
- 辽宁直销全自动焊接机器人工作站系列 2026-04-25
- 桂林自动化全自动焊接机器人工作站保养 2026-04-25
- 深圳通用全自动焊接机器人工作站生产厂家 2026-04-23
- 辽宁工业全自动焊接机器人工作站设备价钱 2026-04-23
- 肇庆一体化全自动焊接机器人工作站生产厂家 2026-04-21
与全自动焊接机器人工作站相关的产品

与全自动焊接机器人工作站相关的新闻
-
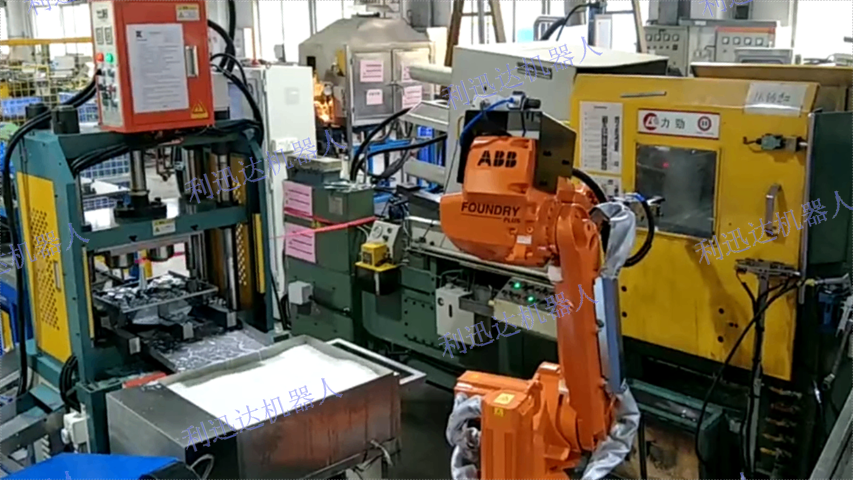
阳江定做全自动焊接机器人工作站保养 2026-04-20 19:10:12从设备管理角度来看,全自动焊接机器人工作站具备较好的可维护性和扩展性。工作站在设计时通常采用模块化结构,各功能单元相对**,便于后期维护和调整。当焊接产品或工艺要求发生变化时,可以通过更换夹具、调整程序或升级焊接电源来实现适配,而无需对整套系统进行大幅改造。在日常运行中,控制系统可对设备状态进行监测...
-
阳江一体化全自动焊接机器人工作站 2026-04-20 12:09:08在全自动焊接机器人工作站的运行过程中,焊接节拍的稳定性直接影响整体生产效率。通过合理规划工艺流程,工作站可以实现装夹、焊接、翻转、检测等工序的有序衔接,减少不必要的等待时间。许多焊接工作站采用双工位或循环工位设计,当一侧进行焊接作业时,另一侧同步完成上下料操作,使机器人始终处于高利用率状态。同时,焊...
-
东莞直销全自动焊接机器人工作站售后服务 2026-04-20 23:10:26在夹具与定位系统设计方面,全自动焊接机器人工作站强调重复定位精度与装夹便捷性的平衡。合理的定位基准能够确保每次上件后工件位置保持一致,从而使机器人轨迹与实际焊缝位置高度匹配。夹具结构通常兼顾刚性与操作空间,既要在焊接过程中提供稳定支撑,又要便于快速装卸,减少辅助时间。对于尺寸公差较大的来料,还可通过...
-
桂林工业全自动焊接机器人工作站耗材 2026-04-19 00:21:18在项目实施阶段,全自动焊接机器人工作站通常会经历方案验证、离线仿真、现场调试以及试生产等多个步骤,以确保**终焊接效果与设计目标保持一致。通过在前期进行焊接轨迹仿真,可以提前发现可能存在的干涉风险与姿态极限问题,从而在设备安装前完成优化调整。进入现场调试阶段后,工程人员会结合实际工件状态,对焊接起弧...
与全自动焊接机器人工作站相关的问题
新闻资讯
产品推荐
-

江门自动化全自动搬运与上下料机器人工作站设备价钱
2026-04-30 -

济南定做全自动搬运与上下料机器人工作站供应商
2026-04-30 -
阳江直销全自动搬运与上下料机器人工作站生产厂家
2026-04-30 -

河北自动化全自动打磨机器人工作站产品介绍
2026-04-28 -

中山工业全自动打磨机器人工作站维修
2026-04-28 -

防城港全自动打磨机器人工作站
2026-04-28 -

玉林智能刀具打磨机器人系统耗材
2026-04-28 -

佛山直销全自动打磨机器人工作站保养
2026-04-28 -

江门一体化全自动焊接机器人工作站维保
2026-04-28