智世四向穿梭车的特点是每台车都可以抵达仓库每一个货位,因此,从理论上讲,如果没有出入库能力要求的话,一个仓库布置1台小车即可以完成整个仓库的出入库作业。这对于出入库频率较低的系统,具有很大优势。作为一个系统来说,智世四向穿梭车需要与货架(轨道)、提升机、输送系统、通讯系统、充电系统组成一个完整的系统才能工作,当然,有关管理、监控、调度和控制的软件系统也是必不可少的。智世四向穿梭车技术是物流仓储系统中的关键技术,尤其是箱式智世四向穿梭车,其主要用途是为“货到(机器)人”拣选提供快速的存取服务,虽然其应用历史还不长,但已经引起了行业的普遍重视,被认为是未来智能物流系统的重要组成部分。四向穿梭车的维护保养也比较重要,只有经常对车辆进行检查和保养,才能有效地降低车辆故障率。高密度四向穿梭机器人厂家推荐
四向穿梭车操作守则介绍:1、货物置遵循从上到下的轻便法则:四向穿梭车架子头重容易发生事故,一旦发生事故,后果不堪设想。所以,装货物的时候一定要把轻的货物放在架子上面,重的放在架子底部以稳定架子底部,避免事故发生。2、货物配置要避免超重的规则:装载时注意不要超重,否则架子容易变形和折断,对架子下的货物和人有危险性,所以也不能存在超重的问题,使用和装载货物的时候也要注意防止撞到架子上。特别是叉车使用运行的时候,使用人必须注意不要让叉车和架子直接相撞。上海箱式四向穿梭车多少钱智世智能四向穿梭车无需频繁更换液压油等保养作业。
智世四向穿梭车的发展趋势:更加柔性化:柔性是物流技术发展的基本方向之一,AGV的应用即充分说明了这一点。智世四向穿梭车从目前的应用看,还有进一步柔性化的空间。如可自行升降的智世四向穿梭车和可在地面行走的智世四向穿梭车即是两个有意义的研究课题。即将AGV,提升机,穿梭车融为一体的技术。这些技术已经有一些研究成果。更加智能化:智世四向穿梭车在用于拆零拣选时,小车的调度对效率的影响非常大。越大的系统,智能化的效果越能体现。比如各种路线优化与排队,就对系统的效率会产生很大的影响。此外,小车的运行状态的实时监测,对于系统的正常运行也有大的影响。所有这些工作都是未来需要不断提升的。
多层穿梭车与四向穿梭车该如何选?从结构上看:四向穿梭车解决了多层穿梭车不能横向移动和换层的问题,这也是四向穿梭车的特点。因此也决定了四向穿梭车具有更大的应用范围和更大的灵活性。尽管多层穿梭车目前也采用了可换层技术,但由于不能横向移动的原因,在灵活性方面还是有很大的限制。比如提升机的布置和输送系统的布局,四向穿梭车可以根据具体应用需求,灵活布置,而多层穿梭车则只能每个巷道布置一套提升机系统,这在很多场合限制了设计的灵活性。智能四向穿梭车是智世自主研发的仓储搬运设备。
智世四向穿梭车和堆垛机怎么选?按区域布局分类:对于库房所建自动化库区域的形状为方形(长宽比小于2)的,或者仓库形状为异型的,建议使用智世四向穿梭车立体库;对于库房所建自动化库区域的形状为长形(长宽比大于2,长度大于50米)的,建议使用堆垛机立体库;按库房层高分类:对于库房所建自动化库区域屋檐高度低于12米的,建议使用智世四向穿梭车立体库,自动化库建议设计3-6层;对于库房所建自动化库区域屋檐高度高于12米的,建议使用堆垛机立体库,自动化库建议设计6层以上;按存储量分类:同等建设面积下,对于存储量(货位量)需求比较高的,建议使用智世四向穿梭车立体库;同等建设面积下,对于存储量(货位量)需求比较低的,建议使用堆垛机立体库。智世智能四向穿梭车纯顶升结构故障率<0.01%。江苏智能四向穿梭车哪家专业
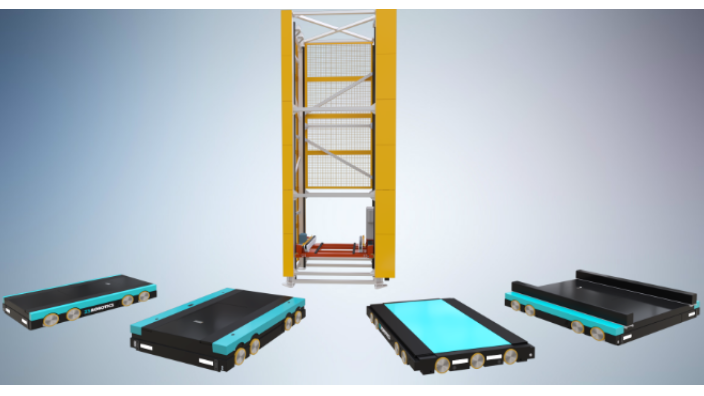
四向穿梭车是集自动搬运、无人引导,智能控制等多功能于一体的智能穿梭车搬运设备。高密度四向穿梭机器人厂家推荐
四向穿梭车出库方式介绍:1、跟入库一样,四向穿梭车待命;2、确定四向穿梭车的取货地点后,WCS系统根据四向穿梭车的当前位置和目的地位置,将取货任务发送给四向穿梭车;3、根据收到的任务指令,四向穿梭车开始取货;4、在交叉轨道上,四向穿梭车通过实际距离以位移模式运行,在运行过程中不断扫描穿过车体下部的轨道。每通过一个路口位置,通过扫描轨迹判断检查运行距离,接近目的地时,通过侧向激光传感器微调停车位置,实现准确定位控制和停车;5、在子通道,四向穿梭穿梭车扫描十字轨道和侧面对中镜的反光贴,通过扫描这些点来判断行驶距离,从而实现在子通道的精确定位控制,到达目的地。高密度四向穿梭机器人厂家推荐