视觉点胶系统可以具备智能调度能力,尤其是能够结合人工智能和机器学习技术的系统。这种系统可以通过学习和优化算法,根据实时的工作环境和任务需求进行智能调度和决策。智能调度能力可以使视觉点胶系统更加灵活和适应性强,如根据优化算法自动调整点胶路径,提高胶水的分发效率和质量,并在不同的点胶任务间实现快速切换。此外,智能调度能力还可以包括识别和处理异常情况的能力。当出现胶水点胶错误、工件位置偏差、光照条件变化或其他干扰因素时,系统可以快速地做出调整和应对。通过自适应的算法和实时反馈机制,系统可以减少工艺缺陷和生产事故的发生,提高工作稳定性和安全性。该系统的高效率胶水应用使生产线能够快速满足客户需求,提升了企业的生产能力。东莞双平台视觉点胶系统非标定制
视觉点胶系统可以通过多种方式来控制胶水的流量,以满足不同的点胶需求。以下是几种常用的控制方式:配置精确的点胶阀:视觉点胶系统通常配置有精确控制胶水流量的点胶阀。这些阀门具有可调节的喷嘴大小和胶水流量控制装置,可以根据需要控制胶水的流速和流量,以确保达到所需的点胶效果。调整点胶阀的开启时间:通过调整点胶阀的开启时间,可以控制每次点胶的胶水流量。开启时间越长,流出的胶水越多,开启时间越短,流出的胶水越少。通过实时监测点胶位置和路径,视觉点胶系统可以根据需要控制每个点胶位置的开启时间,以实现精确的胶水流量控制。中山视觉点胶机系统品牌视觉点胶系统可以根据不同产品要求灵活调整胶水点胶位置。
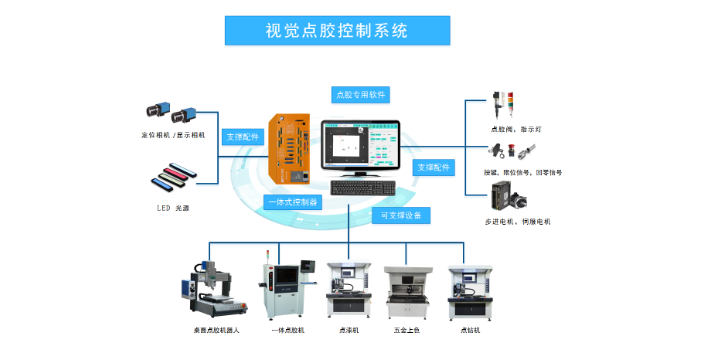
视觉点胶系统中的图像处理软件主要通过以下步骤工作:图像采集:首先,视觉点胶系统会使用相机或其他视觉传感器采集工件表面的图像。这些图像需要涉及到不同的光照条件和角度。预处理:采集到的图像需要会包含噪声、光照不均匀等问题,预处理步骤通常包括图像去噪、灰度变换、滤波以及增强对比度等操作,以确保后续处理的准确性。特征提取:在图像处理软件中,系统会识别工件上的特定特征或模式,这些特征可以是线条、边缘、颜色、形状等。特征提取通常包括边缘检测、轮廓提取、颜色分类等算法。匹配和定位:通过对提取的特征进行匹配和比对,图像处理软件可以确定工件的位置、姿态或其他重要特征。这一步通常涉及模板匹配、特征匹配、图像配准等技术。
视觉点胶系统中使用的图像处理软件通常具有以下功能:图像采集和处理:软件能够实时采集并处理摄像头或激光传感器获取的图像数据,对图像进行滤波、增强、二值化等处理,以获得更准确的图像信息。特征提取和识别:软件可以自动提取并识别工件表面的特征,如形状、大小、轮廓等,以确定点胶的位置和路径,并进行精确的胶水应用。校正和补偿:软件能够检测并校正机器的位移和变形,以确保点胶位置的准确性,并能够自动计算和补偿胶水的体积、重量等要素。缺陷检测和反馈:软件能够检测工件表面的缺陷和异常情况,如表面凹坑、划痕等,以及点胶中出现的失误和错误,以实现自动反馈和调整。在光学仪器制造中,视觉点胶系统可以精确应用胶水,保证产品光学性能。

视觉点胶系统—飞行点胶功能:"旗众智能点胶系统的飞行点胶功能,即在打点运动的过程中,实现动态精细工艺拍照,减少反复起停稳定耗时,实现不停顿生产,大幅提高生产效率。"准确计算点胶位置,实现运动中点胶的“指哪点哪”效果,包括起点/终点准确定位以及每一个点的精确定位,可实现一秒加工十多个产品。当机器人运动到拍照点区域,其内部算法会利用高速IO信号触发相机进行动态无停顿拍照同时对实际拍照位置进行高速锁存,再利用相机回传的位置数据和机器人高速所存位置。视觉点胶系统的自动化功能提高了生产效率,并降低了人为错误的风险。中山自动化视觉点胶系统
具有自动纠正功能的视觉点胶系统避免了人为误差对产品质量的影响。东莞双平台视觉点胶系统非标定制
视觉点胶系统在人机协作中扮演了非常重要的角色。视觉点胶系统主要是通过摄像头采集工件的图像,然后利用图像处理算法对图像进行处理,从而确定工件表面的几何特征和位置信息。基于这些信息,视觉点胶系统可以生成精确的运动轨迹和点胶路径,并将这些信息传递给点胶机,实现精确定位的点胶操作。在人机协作中,视觉点胶系统可以为操作工人提供实时的视觉反馈,并帮助工人快速准确地找到点胶位置。此外,视觉点胶系统还可以根据工件形状、尺寸和材料等信息,自动识别点胶区域,并对点胶量进行控制,从而满足不同工件的点胶需求,提高点胶操作的效率和质量。东莞双平台视觉点胶系统非标定制