柔性力控打磨技术的引入,极大地弥补了国产机器人在刚性不足和精度较低方面的缺陷。其高精度补偿功能以及简洁易用的操作方式,不仅提升了打磨的工艺效果,更确保了打磨过程的一致性和稳定性。这一技术的运用,为工业机器人在打磨领域的应用打开了新的可能性,为实现高效、高质量的批量生产提供了有力支持。机器人打磨技术普遍应用于卫浴、航空、汽车、工业零件、医疗器械以及民用产品等多个行业,特别针对那些要求高精度的打磨抛光作业。这一技术的主要功能涵盖了铸件表面的精细打磨、棱角的毛刺去除、焊缝的平滑处理、内腔和内孔的毛刺去除,以及孔口和螺纹口的精细加工等。抛光机打磨机具备自动检测磨头磨损程度,及时更换磨头。铝件表面打磨去毛刺设备供货商
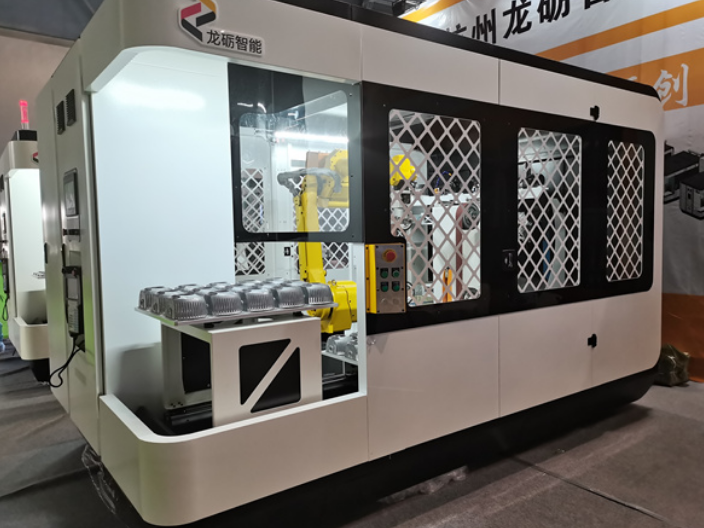
值得一提的是,智能打磨机器人还具备强大的存储功能,能够存储多种叶型的打磨程序。当需要更换叶型时,操作员只需在自动打磨前选择正确的打磨程序,系统便能迅速适应新的叶型需求,实现无缝切换。这种快速适应的能力,使得打磨机器人能够轻松应对各种复杂的生产环境。智能打磨系统还配备了高效的自动吸尘功能。在打磨过程中,系统能够吸收90%以上的粉尘,并将这些粉尘集中收集到70升的集尘箱中。操作员可以根据实际情况,定期清理集尘箱,保持工作环境的整洁和卫生。这一自动吸尘功能不仅降低了粉尘对操作员健康的影响,还提高了工作效率和生产质量。自动打磨机器人生产商可实现镜面抛光效果,提升产品档次。

打磨机器人的多样化操控方法使其能够适应各种复杂的作业任务,从而在实际应用中发挥出巨大的潜力。这些操控方法不仅提高了机器人的工作效率,还提升了其操作的精确性和灵活性。随着科技的不断发展,我们有理由相信,打磨机器人在未来的应用前景将更加广阔。目前市场上应用普遍且技术成熟的机器人非打磨机器人莫属。其普遍应用的原因在于其多样化的操控方式。根据作业任务的不同需求,打磨机器人主要可分为四种操控方法:点位操控、接连轨道操控、力(力矩)操控和智能操控。接下来,我们将详细探讨这些操控方法的功能特点。
点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。抛光机打磨机具备自动调整磨头速度功能,适应不同抛光需求。

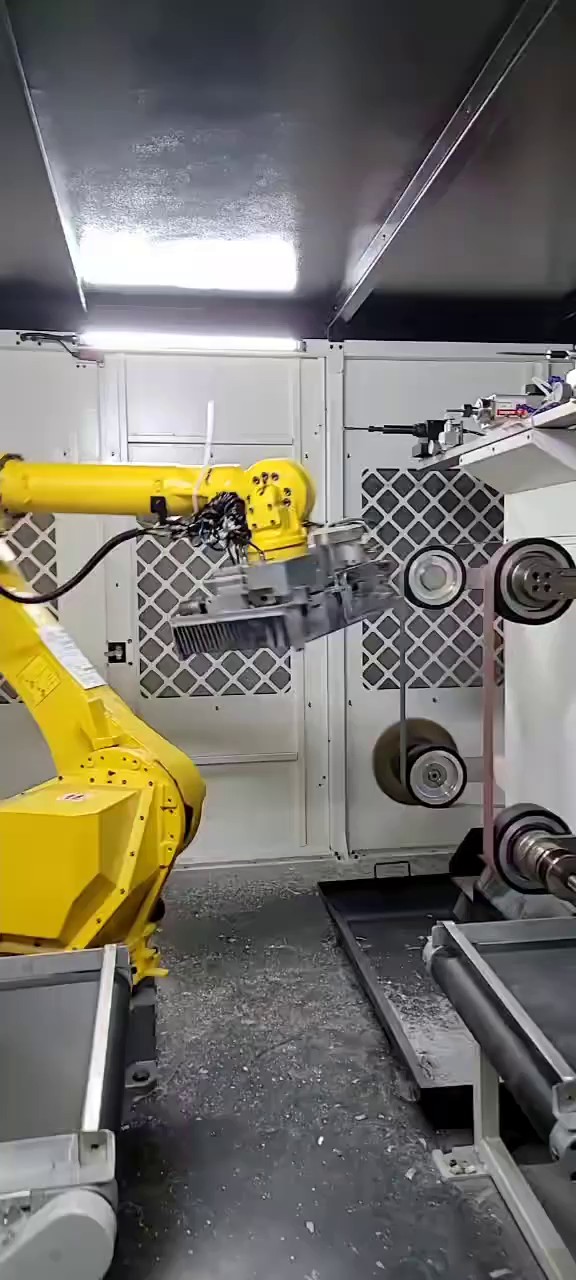
工业机器人常常在预先设定的路径上精确执行,其运行轨迹固定,误差极小。然而,当工件的表面尺寸存在微小的公差,或者定位位置稍有偏差时,打磨效果就会产生明显的变化。可能会出现打磨不到位、压力过大导致过度打磨等问题,进而使得良品率大幅下降,难以满足批量生产的需求。为了应对这一问题,柔性力控打磨系统应运而生。这一系统内置了多种传感器,能够实时检测打磨过程中的压力、设备自身的姿态、加速度等重要信息。通过其独特的重力补偿算法,柔性力控打磨系统能确保设备在任何姿态下都能与工件表面保持稳定接触,并维持打磨力的恒定。机器具备自动调整磨头压力功能,确保抛光效果。便携式打磨机供应商
适用于金属饰品、手表等精密产品的抛光。铝件表面打磨去毛刺设备供货商
在位置控制模式下,机器人会精确地按照预先设定的位置轨迹进行运动。然而,当机器人在运动过程中遇到障碍物并因此产生位置追踪误差时,它会试图通过增加作用力来追踪预设轨迹,这可能会导致机器人与障碍物之间产生巨大的内力。这种内力不仅可能损坏零件,还可能对机器人的结构造成损害。相比之下,力控制模式则更加注重机器人与障碍物之间的作用力控制。当机器人遇到障碍物时,力控制模式会智能地调整其预设位置轨迹,以消除由于障碍物产生的内力。这种调整确保了机器人与障碍物之间的作用力保持在安全范围内,从而避免了可能的损害。铝件表面打磨去毛刺设备供货商