四向穿梭车的优点:高度尺寸小,节省更多存储空间;不但能够在配套的货架轨道上四向行驶,还能利用垂直提升机实现换层作业,进一步增加了仓库货架布局和四向穿梭车库内作业的灵活性、可扩展性。可在立体货架交叉轨道上沿纵向或横向轨道任意行驶,实现一站式点到点输送,可到达仓库平面层的任何一个货位。配合上下提升机,穿梭车可实现自动准确换层的高效工作方式作业;实现空间三维运动,准确控制货架区域内的每一个货位的出入库。具有全自动和半自动两种工作模式。极大提高了货物存取效率及仓库的空间利用率,还可以保持货物的先进先出法存储,清理了人为因素作业的混乱无序或低效率。智世智能四向穿梭车存储更加灵活,柔性更高。安徽冷库型四向穿梭机器人厂家
四向穿梭车有哪些特点?1、结构紧凑:高度和体积小,节省更多的存储空间;它不但可以在支撑货架轨道上向四个方向行驶,还可以利用垂直提升机实现换层作业,进一步增加了仓库货架布局和四向穿梭车库作业的灵活性和扩展性。2、四向行驶:可在立体货架交叉轨道上沿垂直或水平轨道自由行驶,实现一站式点对点运输,可到达仓库平面楼层任意位置;3、智能换层:有了提升机,穿梭车可以实现自动准确换层的高效工作模式;实现立体空间移动,精确控制钢货架区各货舱的出入库。江苏冷库型四向穿梭机器人加装智世智能四向穿梭车节能高效率。
四向穿梭车和多层穿梭车的区别表现在哪里方面?1、精确度,四向穿梭车:四向穿梭车因为有横向轨道,所以对货架的精度以及安装精度标准要求更高,可能导致安装工期和成本费用的提升。多层穿梭车:多层穿梭车是不能实现横向移动性能的,所以对货架的精度及安装精确度要求就没有那么高的要求。2、提升机数量,四向穿梭车:可根据需求配置。多层穿梭车:必须每一个巷道一台提升机。3、车数量,四向穿梭车:四向穿梭车则可以根据流量需求进行灵活确定。多层穿梭车:多层穿梭车小车数量每个巷道每层1台。4、高度限制,四向穿梭车:无限制;多层穿梭车:上限可以达到20米以上;而下限则不宜小于10米。
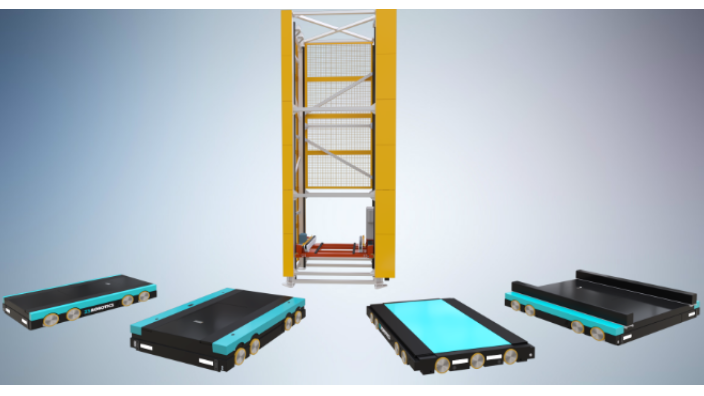
智世四向穿梭车是集四向行驶、原地换轨、自动搬运、智能监控和交通动态管理等多功能于一体的智能搬运设备,又称RGV或四向车,可通过编程实现在立体库上对货物进行托取、运送、放置等操作,并可与仓库控制系统(WCS)进行通讯,结合仓库管理系统(WMS)、RFID、条码识别等物流信息技术,实现货品自动化识别、单次存取、连续存取、自动理货等功能。它与无线遥控相连接,结合RFID、二维码等识别技术,轻松实现货架货物的自动识别和存取。智世四向穿梭车存货的原理是将智世四向穿梭车放置在托盘下的货架轨道上。在WCS系统的引导下,将穿梭车的升降平台面朝上,将托盘单元抬起运行到目的地,然后将托盘上的货物存放到货位上。智世智能四向穿梭车设备自身无固态油脂。
智世四向穿梭车和多层穿梭车系统的不同:多层穿梭车:主要解决的难题是巷道内的定位、供电和通讯难题,而除了以上问题智世四向穿梭车还需要解决车辆避让、车辆调度、转向、换层等难题,尤其是调度、避让等路径规划问题。因此智世四向穿梭车的技术更为复杂。多层穿梭车系统的特点是低密度存储、高速度拣选,即不适合存储量大的作业场景,而更加适合于大规模的快速拣选;智世四向穿梭车系统既适合低流量、高密度的存储,也适合高流量、高密度存储拣选。它可以提供满足客户需求的较佳解决方案。另外从仓库的高度来说,过低的空间对多层穿梭车来说会导致提升机的效率无法发挥,所以多层穿梭车的应用下限不宜小于10米,而对于智世四向穿梭车来说没有限制。四向穿梭车注意事项:检查四向穿梭车的上车体与下车体尺寸是否出现尺寸偏差。江苏冷库型四向穿梭机器人供应商
四向穿梭车-认准智世机器人,常年被全国各地众多企业采购。安徽冷库型四向穿梭机器人厂家
四向穿梭车出库方式介绍:1、跟入库一样,四向穿梭车待命;2、确定四向穿梭车的取货地点后,WCS系统根据四向穿梭车的当前位置和目的地位置,将取货任务发送给四向穿梭车;3、根据收到的任务指令,四向穿梭车开始取货;4、在交叉轨道上,四向穿梭车通过实际距离以位移模式运行,在运行过程中不断扫描穿过车体下部的轨道。每通过一个路口位置,通过扫描轨迹判断检查运行距离,接近目的地时,通过侧向激光传感器微调停车位置,实现准确定位控制和停车;5、在子通道,四向穿梭穿梭车扫描十字轨道和侧面对中镜的反光贴,通过扫描这些点来判断行驶距离,从而实现在子通道的精确定位控制,到达目的地。安徽冷库型四向穿梭机器人厂家