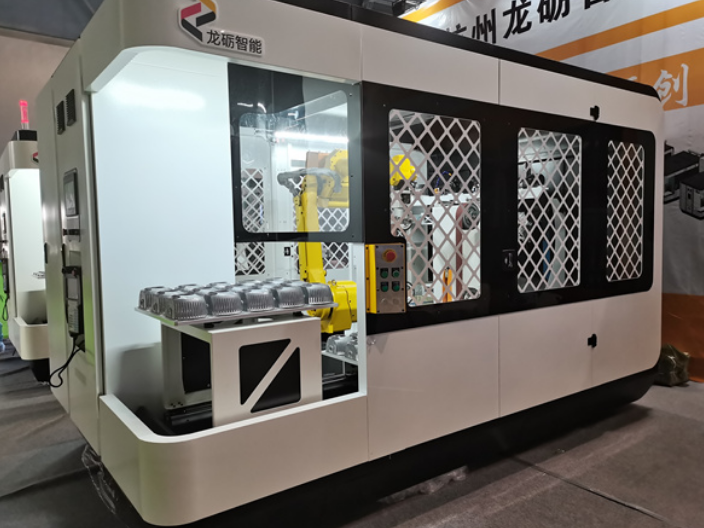
智能打磨系统凭借其先进的力控系统、红外线测距感应器、多种叶型打磨程序存储功能以及高效的自动吸尘功能,为叶片打磨过程提供了全方面的支持和保障。这一系统不仅提高了打磨的精度和效率,还降低了操作难度和环境污染,为现代制造业的转型升级提供了有力支持。在抛光打磨这一领域中,人们对于用机器人来代替人力的需求越来越强烈。然而,抛光打磨机器人的普及程度并没有像焊接和搬运机器人那样迅速增长,原因就在于其实施难度相对较高。机器设计紧凑,占地面积小,节省车间空间。苏州全自动打磨设备
对于企业财产而言,安全则意味着整个生产过程的稳定与可控。自动化生产线的一个明显特点就是其规律性,这种规律性为生产过程的稳定与可控提供了坚实的基础。机器人抛光打磨的应用,就是机器换人技术的一个具体体现。它们能够准确地执行预设的任务,从而替代人类在恶劣的工作环境中进行操作。机器人工作站的设计充分考虑了安全因素。在工作站外部,设置了安全防护栏,确保非操作人员无法进入危险区域。而工作站内部,则配备了先进的传感与驱动控制装置,这些装置能够实时监测机器人的工作状态,并在必要时进行自动调整或停机,从而确保整个工作过程的稳定与安全。舟山大型打磨机机器具备紧急停止按钮,保障工人安全。

打磨机器人的多样化操控方法使得它能够在各种作业环境中发挥出较大的效能。无论是点位操控、接连轨道操控、力(力矩)操控还是智能操控,它们都为打磨机器人的普遍应用提供了有力的技术支持。在现今的机器人市场中,打磨机器人无疑是使用普遍且技术成熟的一种。其普遍的应用主要归功于其多样化的操控方式。根据作业任务的不同需求,打磨机器人主要可以分为点位操控、连续轨道操控、力(力矩)操控和智能操控这四种方式。下面,我们将详细探讨这些操控方式的特性和功能。
在位置控制模式下,机器人会精确地按照预先设定的位置轨迹进行运动。然而,当机器人在运动过程中遇到障碍物并因此产生位置追踪误差时,它会试图通过增加作用力来追踪预设轨迹,这可能会导致机器人与障碍物之间产生巨大的内力。这种内力不仅可能损坏零件,还可能对机器人的结构造成损害。相比之下,力控制模式则更加注重机器人与障碍物之间的作用力控制。当机器人遇到障碍物时,力控制模式会智能地调整其预设位置轨迹,以消除由于障碍物产生的内力。这种调整确保了机器人与障碍物之间的作用力保持在安全范围内,从而避免了可能的损害。机器操作简单,节省人力资源,降低生产成本。
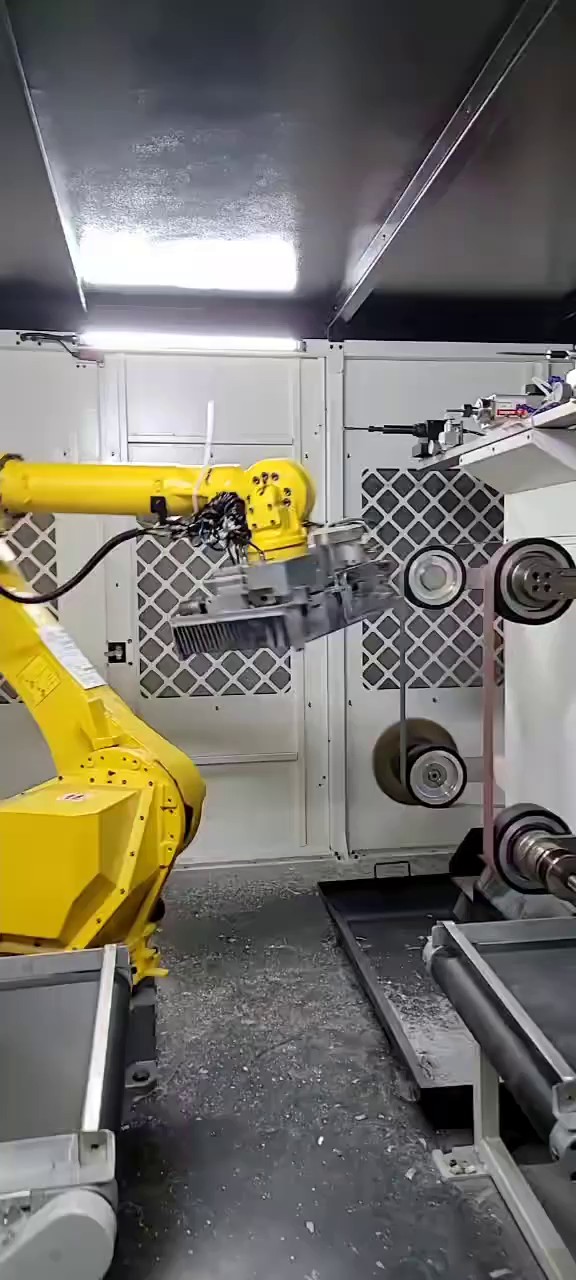
打磨工序主要分为粗打磨和精打磨两个等级。粗打磨主要处理产品的去毛刺、分型线、浇冒口、分模线等问题,而精打磨则更侧重于产品的表面处理精抛等。然而,由于铸件的重复精度和表面粗糙度较差,打磨工具在使用过程中容易磨损,同时打磨时力度的控制变化等不定因素也给机器人的应用带来了一定的复杂性和实施难度。在粗打磨过程中,机器人会根据产品的公差尺寸和要求,按照预设的轨迹进行工作,对产品表面进行粗糙的打磨处理。这种处理方式常用于铸件去毛刺、合模线等应用。在打磨过程中,机器人会保持恒定的速度,并配备大功率的打磨工具。机器人还会根据轨迹速度的变化,确保打磨工具在遇到工件表面时能够保持恒定的切削力,从而通过变速达到保护打磨工具的目的。机器具备远程监控功能,便于管理。嘉兴智能打磨设备
机器具备自动补偿功能,确保抛光效果稳定。苏州全自动打磨设备
力(力矩)操控方法在打磨机器人的应用中起着至关重要的作用。当机器人执行如安装、抓放物体等任务时,除了需要精确的定位,还要求所施加的力或力矩必须适中。为了实现这一目标,就需要使用到(力矩)伺服方法。这种操控方法的原理与位置伺服操控原理基本相似,但其输入量和反馈量不是位置信号,而是力(力矩)信号。因此,这种控制体系中必须有相应的力(力矩)传感器。在某些情况下,还会使用到接近、滑动等传感功能,以实现自适应式操控。苏州全自动打磨设备