小豚智能海豚系列-海豚-68是一款高速、高自主性单体无人船平台,船体采用纤维增强复合材料制造,具有速度快、动力足、载重大、操纵性好、自主性高等优点。海豚-68采用喷水推进驱动,内置先进的运动控制算法和环境感知算法,使其具有良好的高速性能和复杂环境下自主巡航能力,其航速≧25节、续航里程≧120海里、吃水深度0.3m、通信距离≧5km,可广泛应用于内河、湖泊、近海等水域环境。海豚-68无人船通过搭载不同的传感器和设备,可应用于水质监测、水文测量、航道勘测、水域巡逻等多个场景,或根据客户需求进行功能定制。无轴推进器适用于各种冲浪板,水下推力设备,水下辅助动力,无人船推进等场景。广东电控无人船艇
小豚智讯BS-02是一款多功能、易操作的人机交互平台,主要包括小豚智控-RC02遥控器、无线基站、工程计算机、上位机软件。小豚智控-RC02遥控器可实现对无人船、无人机的手动遥控及操纵数据接收和发送;无线基站用于接收无人船、无人机的图像数据和状态数据,并构建一个无线局域网,实现所有无人船、无人机间的相互通信;上位机软件安装在工程计算机上,实现数据处理、显示及任务调度。实现远程的船舶辅助驾驶利器。作为一个岸基系统,它以更好操作更好控制而出名上海水上广告无人船艇一般多少钱喷泵喷水推进器可防水草,速度快。
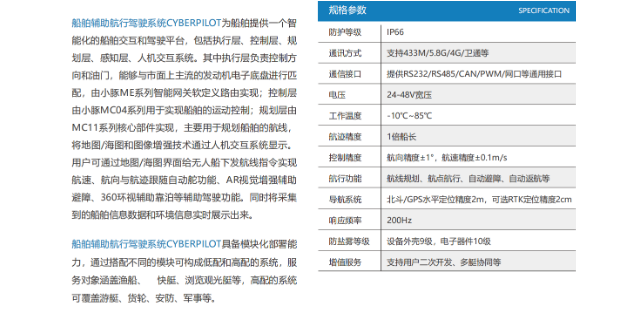
其中,平台系统各分系统定义如下:1、平台本体分系统:包括船体设计与布置、材料与结构以及平台机械,是无人船较基本的组成部分,为整个系统提供浮力、布置空间、执行机构以及必要的防护条件;2、动/能分系统:包括推进系统和电源供给系统,为无人船提供必要的水面机动能力,并为控制系统和任务载荷系统等提供电力支持;3、感知分系统:包括定位导航系统、外部环境感知系统和平台状态感知系统,为无人船运动决策与控制、自身状态监测提供必要的数据源及硬件、接口支持;4、控制分系统:包括控制系统硬件和软件,是无人船的“大脑”,通过全船的感知及控制设备,为无人船处理、分析外部空间及内部环境信息,并根据控制算法实现自主航行、自主避障等功能
从学术到技术,从技术到产品,都是有差距的。耿涛和团队在将课本上深奥、先进的理论知识应用到实际工程的过程中遇到不少困难。为了提升无人艇航线控制器精度,让其水迹呈直线走动,耿涛积极发挥党员的示范作用,带领团队通过大量的理论研究和实操,成功将先进控制理论技术应用到无人船,解决了大量的工程问题。产品从设计、装配、测试到应用,每一步都凝结了耿涛及同事们集体智慧的结晶。正是因为团队中有很多像耿涛一样的党员,在科研岗位上积极发扬着“钉钉子精神”,他们的无人自主技术部分成果已达到国际水平。他们不仅开发了无轴推进器小豚-56s、无人艇平台系列江豚-12c,打造了江豚、河豚、海豚等多系列产品线和品牌,研发生产的小豚智测和小豚智教应用解决方案等系列产品在教育、环保、船舶、测绘、应急等领域得到广泛应用,真正实现了用科技“反哺”教育。其中全自主无人船多艇协同、机艇协同成果,曾被央视新闻等媒体报道。公司致力于研发水下机器人部件。

从0到1开疆土研发成果填补国内无人技术领域空白“我们刚来松山湖的时候,这里的科研条件还十分艰巨:设备稀缺、人才匮乏、配套设施不完善。”忆起往昔,小豚智能团队主要成员王旭东颇有感慨。在此背景下,团队从0到1的研发之路走得艰难。理论技术如何落地到样机上?样机运作时各方面极限值如何提高?如何在水域上进行技术验证?在研发过程中,一个个问题接踵而来。在样机研制过程中,积极寻找合适供应商渠道进行对接;极限工况不足,便思索从设计层面上钻研提升。团队在慢慢地摸索过程中,一一攻克难题,逐步找准了方向。公司本着“创新,务实,开放,担当”的企业文化。北京无人船艇控制部件无人船艇有哪些
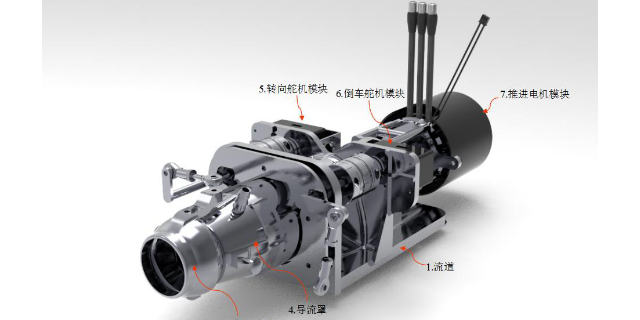
小豚动力-S90的驱动置于推进器内部,可整体浸没于水中,解决了传统推进器通讯线长、干扰大等难题。广东电控无人船艇
经济性特点突出:无人船装备体积小、重量轻、续航时间长、操作简单,维修成本低,可解放减少人力,节省其他装备投入。有些非常规性的项目,可以以购买无人船服务的方式进行,减少固资和操作人员,、降低运营成本。5、响应速度快:在紧急事件发生时,无人船航行速度快,响应及时,比传统有人船只先行到达事故现场,、时间将现场图像数据回传给应急指挥部,为抢救事故现场,救助落水人员争取时间。发生偷捕、事件时,可快速到达现场拍照取证、警示驱离,防止事件恶化,减少财产损失。小豚智能研发的无人船相关产品和技术已在教育、环保、船舶、测绘、应急等领域得到广泛应用,同国内外高校、科研院所在相关领域开展商业合作。公司研发的全自主无人船、多艇协同、机艇协同成果。广东电控无人船艇