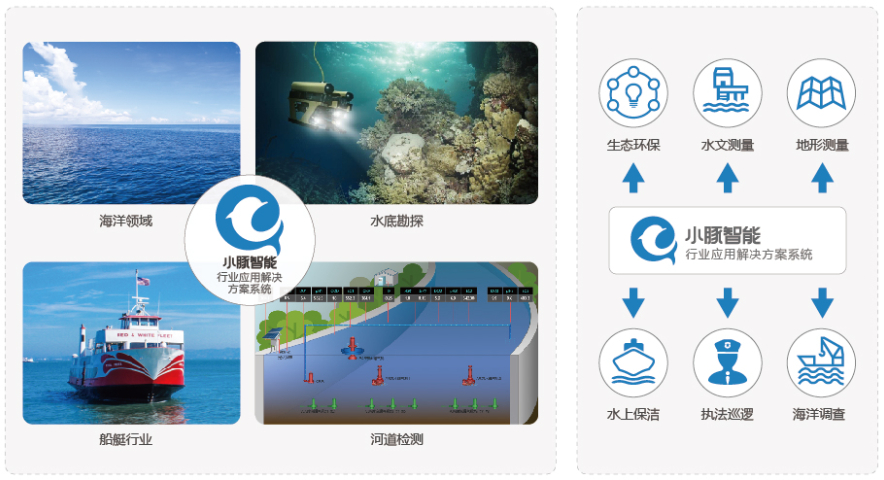
无人船艇的应用领域海洋监测:无人船艇可以搭载各种传感器和设备,对海洋环境进行实时监测和数据采集。这些数据对于海洋科学研究、气候变化研究、渔业资源管理等方面都具有重要的价值。环境保护:无人船艇可以在海洋污染治理、珊瑚礁保护、海洋生态修复等领域发挥重要作用。
例如,搭载了污染检测设备的无人船艇可以实时监测污染物的排放情况,为环保部门提供有力的数据支持。应急救援:在海上事故或灾难发生时,无人船艇可以迅速到达现场,进行搜救、物资运输和现场监控等工作。这种船艇对于提高应急救援效率和降低人员伤亡具有重要的作用。
其他应用:在其他领域,无人船艇可以作为侦察、巡逻、反潜等任务的理想选择。由于无人船艇具有高度的自主性和隐蔽性,因此能够在敌方不察觉的情况下执行任务,提高作战的成功率。 小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”标配系统可服务渔船、快艇、旅游观光船等。辽宁水文测量无人船艇修理
耿涛表示,前身为广东省创新科研团队--全自主无人艇关键技术研究创新团队的小豚智能,目前在无人船环境感知、路径规划与自主控制、多艇协同等方面已突破了一批共性技术和功能部件,拥有各类知识产权40余件。然而,实现技术创新只是第一步。背靠东莞这座制造业重镇,进一步为小豚智能将创新技术从实验室带向市场提供了“变现路径”。谈及落户东莞的原因,耿涛直言,“我们更看重的是东莞包括整个珠三角地区的供应链和营商环境。”据悉,目前小豚智能在松山湖共拥有1400平方米的研发场地和1600平方米的生产场地,其中硬件设备制造主要外包给合作厂商负责。“(制造商)多得是,上下游企业都有。”耿涛表示。广东水质监测无人船艇是什么小豚智能是先提出“全自主无人艇”概念的团队。国内无人艇技术研究仍处于初级阶段。

随着技术的不断进步和创新,无人船艇将会在未来发挥更加重要的作用。
未来发展趋势包括以下几个方面:技术升级:随着人工智能、物联网、5G等技术的不断发展,无人船艇将会具备更强的自主导航、远程操控、感知能力等。同时,无人船艇的建造材料也将不断优化,提高其耐用性和可靠性。应用拓展:随着无人船艇技术的不断成熟和市场需求的不断增加,其应用领域也将不断拓展。例如,在海洋渔业、海洋工程、海洋考古等领域,无人船艇都将发挥重要作用。规范制定:随着无人船艇的广泛应用,其规范制定也将会逐渐完善。
国际海事组织(IMO)和各国将会制定更加严格的法规和标准,确保无人船艇的安全和合规运营。跨界合作:未来无人船艇的发展将需要跨界合作,包括航运业、造船业、科技企业、科研机构等多个领域的合作。通过跨界合作可以实现资源共享和技术创新,推动无人船艇产业的发展。
总之,无人船艇的运用将在未来的海洋工程领域发挥重要作用。随着技术的不断升级和应用领域的不断拓展,无人船艇将会为人类带来更多的便利和创新价值。
融合新技术:未来的无人船艇将与新技术不断融合,如人工智能、5G通信、北斗导航等。这些技术的引入将进一步增强无人船艇的性能和应用范围。应对挑战:随着无人船艇的广泛应用,如何保障其航行安全、隐私权等问题也将成为未来的研究重点。
需要制定相应的法律法规和技术标准来规范无人船艇的发展和应用。市场需求驱动:随着人们对海洋资源的关注度不断提高以及海洋产业的不断发展壮大,对无人船艇的需求也将不断增加。这将为无人船艇产业提供广阔的市场空间和发展机遇 无人船艇的自主导航技术,确保了其在复杂水域的安全航行。
东莞小豚智能技术有限公司:无人船的系统由什么组成呢?无人船由平台系统和任务载荷系统组成,两系统之间通过通用接口进行集成。
平台系统包括平台本体分系统、动/能分系统、感知分系统、控制分系统、通信分系统和交互分系统,六个分系统共同组成无人船较基本的通用单元,可以独自操作运行,是为完成不同任务而设计的搭载平台。
任务载荷系统指无人船用以执行任务的仪器设备及配套伺服机构、装置,可根据不同任务目的、用途规划出不同的任务载荷系统 创智号”试验船由中国船舶七〇二所、深海技术科学太湖实验室,以及小豚智能等单位共同研制。江西水文测量无人船艇服务
船舶智能化改造,小豚智能负责了船舶智能测控平台的信息采集、数据显示、航行控制研究。辽宁水文测量无人船艇修理
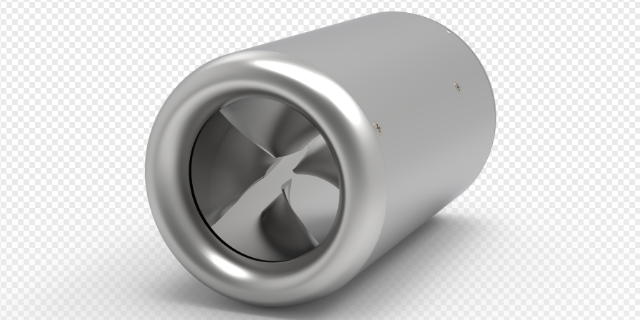
小豚动力-WJ064是一款电控一体化喷水推进器,具有全数字接口、控制角度精度高、集成度高、功率密度大等优点。小豚动力-WJ064集成了主推电机、流道、转向舵机、喷嘴等主要结构,具有控制精度高、响应快,推进效率高等优点,可提高装配船体的操纵性和通过性。
小豚动力-WJ064使用高功率密度驱动器驱动,输出功率涵盖4.5kW以下功率区间;调速过程平稳,转速控制精度可达±5%;转向采用高精度伺服控制技术,舵角控制精度可达0.1°,动态响应迅速,舵速可达60°/s;功率密度大,1.6m船体比较高航速可达10m/s。
小豚动力-WJ064采用CAN总线进行通信,比较高通信频率为100Hz,具备多套推进器同步联动技术,便于进行系统集成及二次开发 辽宁水文测量无人船艇修理