(中篇)在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄是怎样通过智慧云平台下发指令对车端进行交互控制,监控实时作业情况?
二、指令下发与交互控制流程
1.用户请求生成:用户通过移动应用或网页界面向智慧云平台发出请求,例如要求监控某辆车的实时作业情况或向驾驶员下发语音指令。
2.云平台接收并处理请求:云平台接收到用户请求后,进行解析和处理。根据请求内容,云平台生成相应的控制指令,并通过选定的通信协议(如HTTP、MQTT等)将指令发送给MDVR系统。
3.MDVR系统接收指令:MDVR系统接收到来自云平台的指令后,进行解析并根据指令内容执行相应的操作。例如,如果指令是要求监控实时作业情况,MDVR系统将启动视频采集和传输功能;如果指令是要求向驾驶员下发语音指令,MDVR系统则将指令发送给TTS喇叭。
4.TTS喇叭合成语音并播放:TTS喇叭接收到来自MDVR系统的文本指令后,将其合成为语音信号并播放出来。这样,驾驶员就能听到来自云平台的语音指令,并根据指令执行相应的操作。
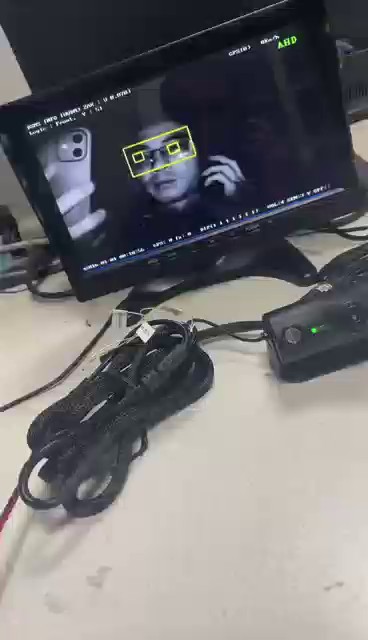
5.对讲手柄进行语音通信:在需要时,驾驶员可以通过对讲手柄与云平台或其他车辆进行语音通信。这有助于实时交流信息、协调作业或处理紧急情况。 疲劳驾驶预警系统检测到驾驶员出现闭眼,低头,打哈欠,左顾右盼,吸烟,打电话等疲劳或分神状态,及时发出警告.浙江矿车司机行为检测预警系统公司
(上篇)自带算法的疲劳驾驶预警系统采用独特的图像识别技术,能够在复杂多变的驾驶环境中有效监测驾驶员的疲劳状态,同时避免外界光源对监测效果的干扰。以下是对该系统如何避免外界光源干扰的详细阐述:
一、光源校准与滤光技术光源校准:系统使用光源校准工具对光照进行精确校准,确保检测环境内光照条件的一致性和稳定性。这有助于减少不同光源带来的亮度差异,从而降低干扰。滤光器应用:通过应用滤光器,系统能够过滤掉特定波长的光线,只允许特定波长的光线通过。这种技术有助于减少光线反射和散射造成的干扰,提高图像识别的准确性。
二、偏振光源与偏振片的使用系统采用偏振光源和偏振片,通过控制光的偏振方向来消除不需要的背景光和杂散光。这种方法能够只保留检测所需的偏振方向的光,从而有效避免外界光源的干扰。
三、图像预处理与增强技术图像去噪与增强:在图像识别过程中,系统首先对采集到的图像进行去噪和增强处理。这有助于提高图像质量,减少因光源干扰而产生的噪声和伪影。特征提取与匹配:系统从处理后的图像中提取有用的特征信息,如颜色、纹理、形状等,并与已知特征库进行匹配。这一过程能够进一步降低外界光源对识别效果的影响。
贵州司机行为检测预警系统技术解决方案疲劳驾驶预警系统适用于多种类型的车辆,包括长途客/货运车,危险品运输车辆,校车,出租车,公交车和家用轿车.

(中篇)自带算法且具备视频同步输出功能的疲劳驾驶预警设备是一种集成了先进技术与智能算法的安全辅助设备,以下是对其的具体阐述:
同时,设备还可以将预警信息发送到后台系统,以便相关人员及时采取措施进行干预。
三、技术原理传感器采集:设备利用摄像头、红外线传感器等硬件设备,实时收集驾驶员的生理数据和周围环境信息。数据预处理:对采集到的数据进行去噪、滤波等预处理操作,以保证数据的可靠和准确。算法分析:通过图像识别、模式识别等算法对处理后的数据进行分析,判断驾驶员是否处于疲劳状态。这包括对驾驶员自身特征的检测(如生理指标、生理反应)以及结合车辆行驶状态的综合判断(如转向频率、刹车频率、行驶速度等)。预警策略:根据分析结果,设备会采取相应的预警策略,如发出声音或视觉信号提醒驾驶员。
(下篇)自带算法的疲劳驾驶预警系统中,GPS的功能并不仅限于获得车速信息,但确实在这一方面发挥着重要作用。以下是对GPS在疲劳驾驶预警系统中获得车速信息功能的详细阐述:
例如,当GPS检测到车速异常时,系统可以结合方向盘的转向频率和幅度等信息来判断驾驶员是否处于疲劳状态。三、GPS车速信息的准确性与局限性虽然GPS在获取车速信息方面具有一定的优势,但也存在一些局限性。例如,当车辆行驶在复杂环境(如隧道、城市峡谷等)中时,GPS信号可能会受到干扰或遮挡,导致车速信息不准确。此外,由于GPS是基于位置变化来计算车速的,因此在短时间内(如几秒钟内)的车速变化可能无法被准确捕捉。为了提高GPS车速信息的准确性,可以采取一些措施,如使用更高精度的GPS接收器、优化算法以减少信号干扰的影响等。同时,也可以结合其他传感器(如雷达、激光雷达等)来提供更准确的车速信息。
综上所述,GPS在自带算法的疲劳驾驶预警系统中扮演着重要角色,它不仅能够提供车速信息以帮助系统判断驾驶员的疲劳程度,还能够记录行驶轨迹并为事故调查提供线索。然而,也需要注意到GPS在获取车速信息方面存在的局限性和挑战,并采取相应的措施来提高其准确性。 自带算法的疲劳驾驶预警系统具有良好的兼容性和可扩展性,可以与车辆的其他安全系统进行集成和联动.

(中篇)车载自带算法的疲劳驾驶预警集成MDVR实现云台管理的原理
2.3云台控制-自动追踪:-通过疲劳检测算法分析驾驶员头部位置,动态调整云台角度,确保摄像头始终对准驾驶员面部。-使用人脸识别和头部姿态估计技术,实现精细追踪。-远程控制:-通过云平台或用户终端,管理员可以手动调整云台角度,优化监控范围。
2.4MDVR集成-视频录制与存储:-MDVR实时录制车内视频,并将视频数据存储到本地或上传至云平台。-支持循环录制,确保存储空间高效利用。-数据同步:-将疲劳检测结果与视频数据同步,便于后续查看和分析。-事件触发录制:-当检测到疲劳驾驶或其他异常事件时,MDVR自动标记并保存相关视频片段。
2.5数据传输与云平台管理-数据传输:-通过4G/5G网络将视频数据、疲劳检测结果和传感器数据上传至云平台。-远程管理:-管理员可以通过云平台查看实时视频、调整云台角度、下载历史数据。-预警通知:-当检测到疲劳驾驶时,系统通过云平台向管理员或驾驶员发送预警通知。
3.关键技术-计算机视觉:用于驾驶员面部特征提取和疲劳状态识别。-云台控制算法:实现摄像头的自动追踪和角度调整。-边缘计算:在车载终端进行实时数据处理,减少对云平台的依赖。 疲劳驾驶预警系统具备自动校准功能,能够根据环境变化调整图像参数,以保持识别精度.海南疲劳驾驶预警系统开发平台
自带算法的疲劳驾驶预警系统,设计符合ONVIF协议标准的视频输出接口,确保视频流通过ONVIF协议传输.浙江矿车司机行为检测预警系统公司
(上篇)自带算法识别与云端识别的司机疲劳驾驶预警系统各自具有独特的应用区别与优势,以下是对这两者的详细分析:
自带算法识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统在本地设备上运行算法,对采集到的驾驶员面部特征、眼部信号等进行实时处理和分析,从而判断驾驶员是否疲劳。所有数据处理和决策均在本地完成,不依赖于外部网络。系统架构:系统结构相对紧凑,包括摄像头、传感器、控制器和算法模块等关键组件,易于集成到车载系统中。隐私保护:由于数据处理在本地进行,不涉及数据上传和存储,因此具有更高的隐私保护性能。优势实时性强:由于数据处理在本地完成,系统能够迅速响应并发出预警,有效减少因网络延迟而导致的预警滞后。稳定性高:不依赖于外部网络,系统受网络故障的影响较小,因此具有更高的稳定性。成本低:无需构建和维护复杂的云端基础设施,降低了系统的整体成本。自主性强:系统完全在本地运行,不受外部因素(如网络状态、云端服务器性能等)的干扰,提高了系统的自主性。
云端识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统将采集到的驾驶员面部特征等数据上传至云端服务器,由服务器进行算法处理和识别。
浙江矿车司机行为检测预警系统公司