无人机在农业领域能够实现高效率的施肥、播种等操作。但是不同的作业环境对于无人机的工作性能要求不一样,同样的方案在平原地区适用,在高原地区就不行。因此针对于特殊作业环境需要制定不同的智慧化方案。像青藏高原这样地貌复杂、低气压、大温差的特点,参与智能化工作的各个部件需要符合这样作业环境特点的性能要求。不...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
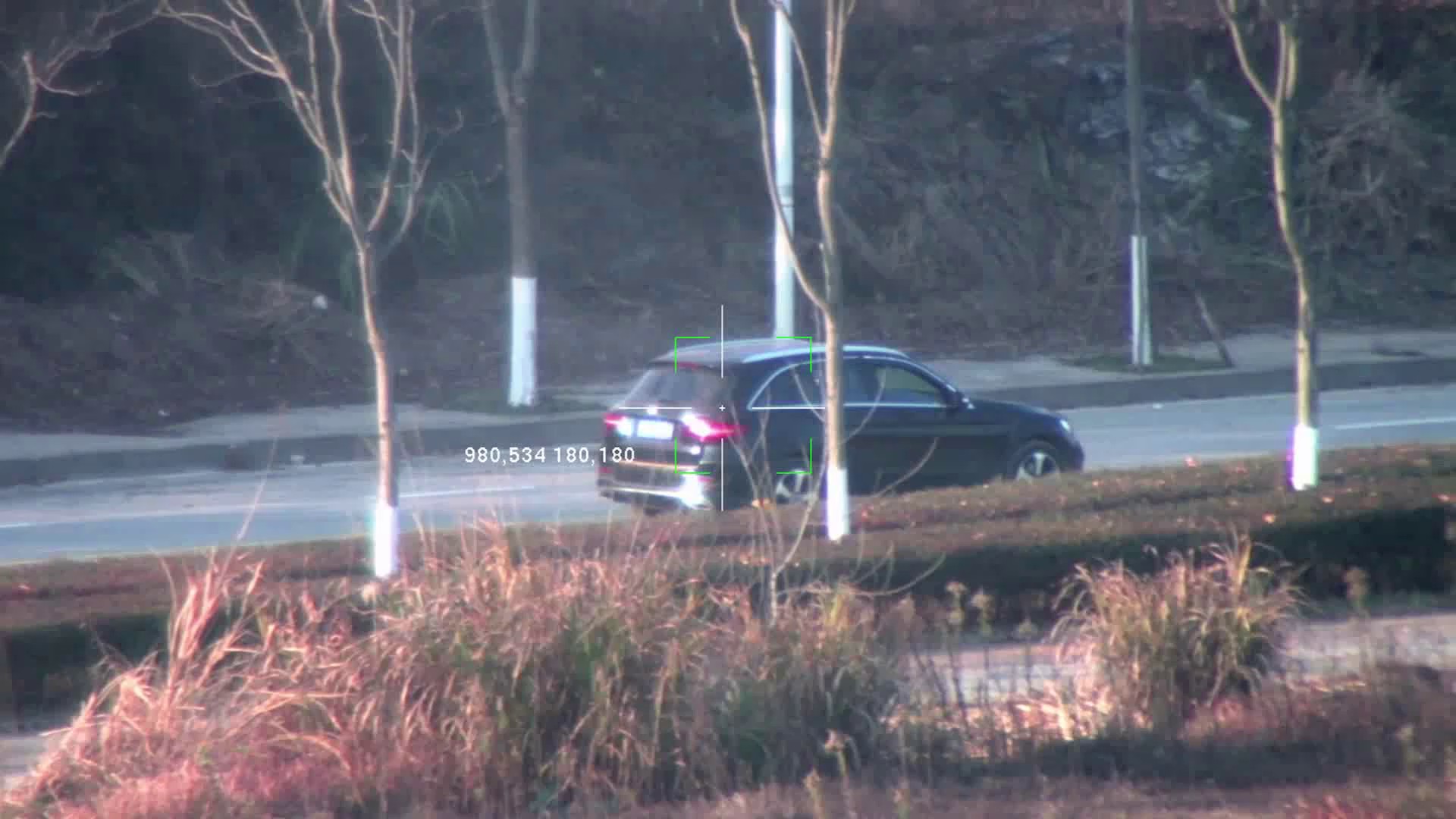
云台的旋转将直接改变摄像机的视野,因此对于云台的控制必须谨慎且准确。错误的控制会使目标从视野中消失,导致跟踪的失败。此外,如果云台的控制幅度过小,可能会达不到目标回到视野中心的目的,目标也同样极易丢失。相反如果在对目标运动速度有可靠估计的前提下,提前将目标移到视野中目标运动方向的另一侧,将为此后跟踪目标赢得更多的时间,能够提高跟踪的成功率。所以为了使对于云台的控制更为合理,应该对于不同的情况采取不同的控制策略。对于情况的划分主要取决于目标的可靠性和速度的稳定性。无人机吊舱能够通过定制算法和精细定位技术实现农药精细喷洒、农作物精细抛粮等操作。广东稳定目标跟踪
目标跟踪
人工智能起源于上个世纪五十年代,被誉为新时代工业发展的引擎。随着技术的发展,为了使得计算机可以拥有像人眼一样感知、分析、处理现实世界的能力,六十年代初,人工智能衍生出了一个重要的分支,计算机视觉。在计算机视觉的研究过程中,学者们为了阐述“根据目标在视频中的某一帧状态来估计其在后续帧中的状态”,一个新的学科——目标跟踪应运而生。目标跟踪是计算机视觉和机器人研发领域的重要分支,在人机交互、安全监控、自动驾驶、城市交通、军领域、医疗诊断等领域都发挥了重要的作用,其主要功能就是在视频图像中遍历感兴趣的区域,并在接下来的视频帧中对其进行跟踪云南什么目标跟踪慧视微型双光吊舱能够实现昼夜成像。

相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面提到的TLD或Struck,他们都会在每一帧中随机地挑选一些块进行训练,学习到的特征是这些随机子窗口的特征,而CSK作者设计了一个密集采样的框架,能够学习到一个区域内所有图像块的特征。
目标跟踪算法具有不同的分类标准,可根据检测图像序列的性质分为可见光图像跟踪和红外图像跟踪;又可根据运动场景对象分为静止背景目标跟踪和运动背景下的目标跟踪。由于基于区域的目标跟踪算法用的是目标的全局信息,比如灰度、色彩、纹理等。因此当目标未被遮挡时,跟踪精度非常高、跟踪非常稳定,对于跟踪小目标效果很好,可信度高。但是在灰度级的图像上进行匹配和全图搜索,计算量较大,非常费时间,所以在实际应用中实用性不强;其次,算法要求目标不能有太大的遮挡及其形变,否则会导致匹配精度下降,造成运动目标的丢失。无人机可能会受到敌方势力或者强风等因素干扰,造成不同幅度的振动,从而影响板卡能否正常完成任务。

低空经济成为当下火热的行业之一,各行各业都想利用无人机为自己服务,但是却面临一个问题,专业人才严重不足。有关数据显示,我国无人机经营性企业已超过1.7万家,全国实名登记的无人机已超过200万架。而无人机人才的缺口却多达100万,这就给低空经济的快速发展按下了慢速键。各大高校陆续建设无人机专业,但是四年的教学路怎么也得一步一个脚印,为了应对市场需求,只能从高效率的教学方法着手,让学生更多的结合实际操作进行学习,能够让学生在毕业之后更快的适应工作需求,进而提升稳定就业的概率。慧视光电基于AI图像处理的监控监管方案能够实现安全生产。广东稳定目标跟踪
智能图像跟踪在机场周界中的应用。广东稳定目标跟踪
“启明935A”系列芯片已经成功点亮,并完成各项功能性测试,达到车规级量产标准。启明935A是行业首颗基于Chiplet(芯粒/小芯片)异构集成范式的自动驾驶芯片,但并非单一芯片,而是一个家族系列。启明935HUBChiplet可以和不同数量的大熊星座AIChiplet互相搭配,再结合灵活的封装方式,快速形成不同性能等级的SoC芯片。它还支持高带宽的PBLink多芯互连,双芯双向带宽128GB/s,四芯双向带宽64GB/s。启明935A每颗芯片都支持比较大20路的1080p60摄像头输入,可应用于各类端侧AI部署。得益于大熊星座NPU天然支持Transformer结构,初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。广东稳定目标跟踪
与目标跟踪相关的文章

哪些目标跟踪解决
- 比较好的目标跟踪产品 2026-04-30
- 浙江目标跟踪市场报价 2026-04-29
- 黑龙江高性能目标跟踪 2026-04-29
- 重庆目标跟踪推荐厂家 2026-04-29
- 河南移动目标跟踪 2026-04-29
- 山东目标跟踪哪里买 2026-04-29
- 人防目标跟踪报价行情 2026-04-29
- 工业目标跟踪好选择 2026-04-28
- 哪里有目标跟踪哪里好 2026-04-28
- 安徽目标跟踪解决 2026-04-28
- 辽宁国产目标跟踪 2026-04-28
- 四川目标跟踪诚信推荐 2026-04-27
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
江苏低压线目标跟踪 2026-04-27 07:01:24识别算法的性能提升依靠大量的图像标注,传统模式下,需要人工对同一识别目标的数据集进行一步一步手动拉框,但是这个过程的痛苦只有做过的人才知道。越多素材的数据集对于算法的提升越有帮助,常规情况下,一个20秒时长30帧的视频就多达两三百张画面需要标注,如果视频时长或者视频的帧速率增加,需要标注的帧画面将会...
-
广西附近目标跟踪 2026-04-27 10:01:19长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的...
-
甘肃目标跟踪产品 2026-04-26 00:11:30多边形标注能够能够帮助我们标注一些规则复杂的物体,如动物、人、车、建筑物等,与矩形标注框等方法相比,多边形标注更能精确展示被标注物体的形状、大小以及实时形态,通过大量的多边形标注工作,能够更好的帮助我们提高算法模型的准确性和鲁棒性。传统的多边形标注方法中,标注者需要在物体的边缘上依次单击鼠标或使用绘...
-
光纤数据目标跟踪有哪些 2026-04-26 15:01:20深度学习技术,特别是神经网络,已经在图像和语音跟踪领域取得了不小的进展。这些技术可以应用于物联网设备,实现更加智能化的交互和控制。物联网、人工智能和大数据的融合正在开启一个智能化的新纪元。这种融合不仅推动了技术革新,还为各行各业带来了深刻的变革。随着技术的不断发展,这一融合将推动智能家居、智能城市、...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
江西稳定目标识别办公平台
2026-05-04 -
安徽可靠目标识别售价
2026-05-04 -
智能化目标识别自主可控
2026-05-04 -

江苏移动目标识别自主可控
2026-05-04 -
黑龙江移动目标识别供应商
2026-05-04 -
福建省时省力图像标注大概价格
2026-05-04 -

安徽信息化图像标注功能
2026-05-04 -
北京高性能目标识别控制软件
2026-05-04 -

吉林无源目标识别情况
2026-05-04