
无人机在军备领域有着突出作用,它不仅能帮助进行信息侦查,还能进行智能炮弹高空精细打击。其中,在智能精细打击领域,少不了人工智能的参与。通过人工智能的控制分析,能够实现对打击目标的AI识别。选择这样的方式,能够减少末端打击时对方电子干扰的影响,尽可能保证无人机的重复使用,图像处理设备显然比无人机本身更...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
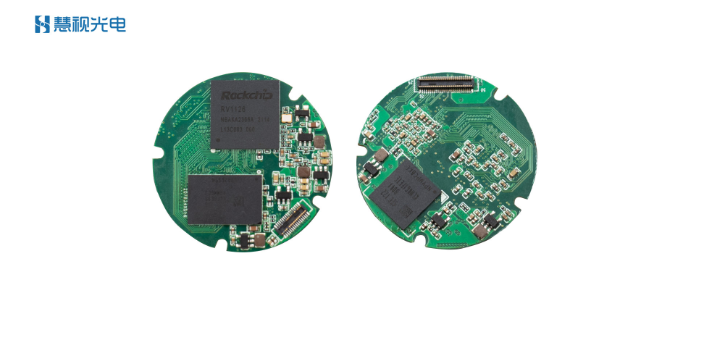
无人机的迅猛发展,使得无人机的反制技术也水涨船高,常见的有电子干扰、无人机识别对抗等方式。后者采用图像识别技术,通过在无人机摄像头的基础上加装AI高性能图像处理板,在算法的作用下,就具备无人机识别的功能,为无人机对抗创造条件。由于无人机飞行速度极快,因此针对于这样环境下的AI识别需要“与众不同”的图像处理板。我们都知道,当视频帧率越高时,视频越能够体现画面细节信息,而图像识别算法正是逐帧进行识别,因此,摄像头捕捉到的画面细节越多,识别的精度就会越高。RV1126处理板如何实现目标的识别及跟踪?湖南目标跟踪互惠互利
目标跟踪
视觉目标跟踪是指对图像序列中的运动目标进行检测、提取、识别和跟踪,获得运动目标的运动参数,如位置、速度、加速度和运动轨迹等,从而进行下一步的处理与分析,实现对运动目标的行为理解,以完成更高一级的检测任务。根据跟踪目标的数量可以将跟踪算法分为单目标跟踪与多目标跟踪。相比单目标跟踪而言,多目标跟踪问题更加复杂和困难。多目标跟踪问题需要考虑视频序列中多个单独目标的位置、大小等数据,多个目标各自外观的变化、不同的运动方式、动态光照的影响以及多个目标之间相互遮挡、合并与分离等情况均是多目标跟踪问题中的难点。湖北工业目标跟踪慧视RK3399PRO板卡可以用于大型公共停车场。

成都慧视推出的深度学习算法开发平台SpeedDP,它的主要功能就是帮助进行算法模型的测试验证,进行快速的针对大量数据的AI自动标注,然后提升自身算法能力。在无人机智能炮弹测试验证中,通过对原始算法的模型训练,能够不断评估算法的能力,然后对新的打击数据集目标进行AI自动标注,让算法在学习中不断变得聪明。通过SpeedDP的应用,能够极大减少整个测试验证所需时间,减少人力成本支出,减少项目开发周期,让工程师不再为繁琐的图像标注浪费时间将更多的精力放在更重要的领域。
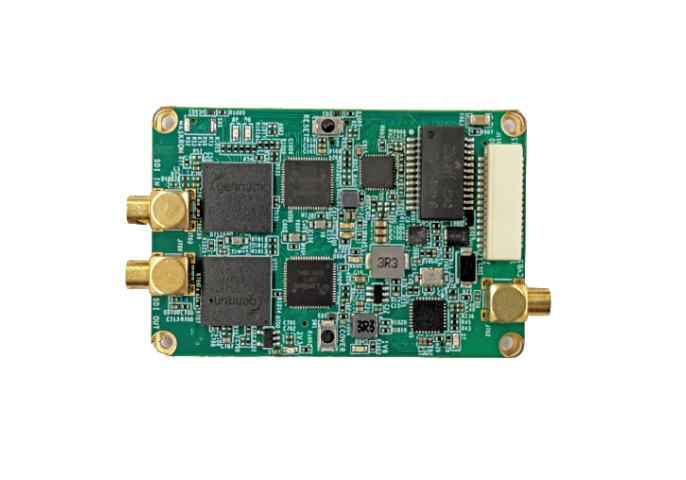
跟踪任务与检测任务有着密切的关系。从输入输出的形式上来看,这两个任务是极为相似的。它们均以图片(或者视频帧)作为模型的输入,经过处理后,输出一堆目标物置的矩形框。它们之间比较大的区别体现在对“目标物体”的定义上。对于检测任务来说,目标物体属于预先定义好的某几个类别,如图1左图所示;而对于跟踪任务来说,目标物体指的是在首帧中所指定的跟踪个体,如图1右图所示。实际上,如果我们将每一个跟踪的个体当成是一个类别的话,跟踪任务甚至能被当成是一种特殊的检测任务,称为个体检测(Instance Detection)。RK3588图像处理板是我司自主研发的目标跟踪板,该板卡采用国产高性能CPU,搭载自研目标跟踪及跟踪算法。

此前,九号电动车的自平衡技术一次次刷新人们的认知,而其中一款探索版车型,甚至加入了智能摄像头,能够识别行人、障碍物,自动规划行驶路线,达成自动驾驶的目的。很多人好奇这种怎么做到的,其实很简单,车辆内部摄像头安装了具备图像处理的传感器。这种传感器就是图像处理板,这类AI板卡在目标识别算法的赋能下,就能够对视野范围的物体进行AI分类识别,从而帮助车辆进行避障。像成都慧视开发的高性能AI图像处理板Viztra-HE030,采用的是RK3588开发而成,凭借其工业级的性能,6.0TOPS的算力,就能够在车辆行驶过程中的复杂环境下进行周边环境的快速AI识别分类。当然,算法的能力也十分关键,由于车辆行驶环境的不断变化,算法面临的识别画面也不断变化,如何精细的进行识别,关系到车辆的行驶安全。工程师以RK3399PRO核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。湖北工业目标跟踪
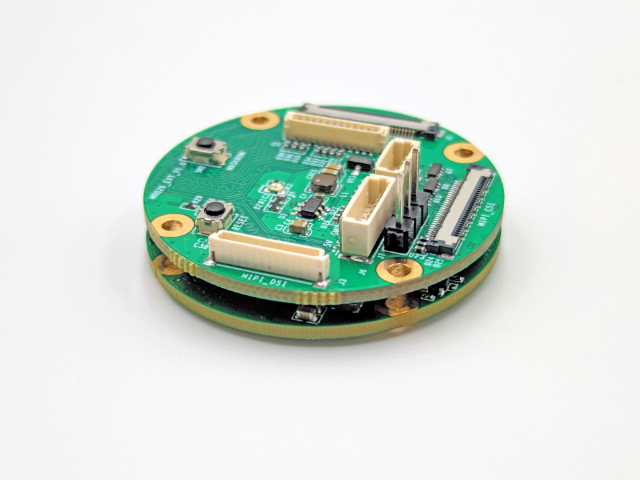
慧视光电对RV1126跟踪板进行二次开发,实现AI智能应用。湖南目标跟踪互惠互利
当两个图像之间还有旋转或比例变化时,往往使用基于控制点的方法进行图像配准。所谓特征点匹配就是在一帧图像中寻找具有不变性质的结构—特征点,例如,灰度局部极大值、局部边缘、角等,与另一帧图像中的同类特征点作匹配,从而求得该两帧图像之间的变换关系。从现实的观点看,在全部特征点中,只有部分能得到正确的匹配,这是因为特征点寻找算法并非完美无缺。特征点匹配方法具有:处理的数据量不断减少、可能匹配的数目少于互相关方法和受照度、几何的变化影响较小的优点。根据具体的振动情况,选择合适的特征点和速度较快的匹配策略是该任务研究的重点。目前的研究工作都致力于图像间的自动配准,如直接相关匹配,基于图像分割技术的配准,利用封闭轮廓的形心作为控制点的配准等。湖南目标跟踪互惠互利
与目标跟踪相关的文章

自主可控目标跟踪
- 哪些目标跟踪解决 2026-05-02
- 比较好的目标跟踪产品 2026-04-30
- 浙江目标跟踪市场报价 2026-04-29
- 黑龙江高性能目标跟踪 2026-04-29
- 重庆目标跟踪推荐厂家 2026-04-29
- 河南移动目标跟踪 2026-04-29
- 山东目标跟踪哪里买 2026-04-29
- 人防目标跟踪报价行情 2026-04-29
- 工业目标跟踪好选择 2026-04-28
- 哪里有目标跟踪哪里好 2026-04-28
- 安徽目标跟踪解决 2026-04-28
- 辽宁国产目标跟踪 2026-04-28
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
数据目标跟踪服务电话 2026-04-27 02:01:18SpeedDP作为一个服务型AI平台,它能提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。平台所需算法并不是固定的,使用者可以根据自身实际应用场景进行AI算法的定制化开发,例如平台经过不断的迭代,目前能够支持YOLOv8系列算法进行图像标注。Speed...
-
江苏低压线目标跟踪 2026-04-27 07:01:24识别算法的性能提升依靠大量的图像标注,传统模式下,需要人工对同一识别目标的数据集进行一步一步手动拉框,但是这个过程的痛苦只有做过的人才知道。越多素材的数据集对于算法的提升越有帮助,常规情况下,一个20秒时长30帧的视频就多达两三百张画面需要标注,如果视频时长或者视频的帧速率增加,需要标注的帧画面将会...
-
广西附近目标跟踪 2026-04-27 10:01:19长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的...
-
甘肃目标跟踪产品 2026-04-26 00:11:30多边形标注能够能够帮助我们标注一些规则复杂的物体,如动物、人、车、建筑物等,与矩形标注框等方法相比,多边形标注更能精确展示被标注物体的形状、大小以及实时形态,通过大量的多边形标注工作,能够更好的帮助我们提高算法模型的准确性和鲁棒性。传统的多边形标注方法中,标注者需要在物体的边缘上依次单击鼠标或使用绘...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
广东视频目标识别24小时服务
2026-05-05 -
可靠图像处理板诚信合作
2026-05-05 -

黑龙江企业图像标注应用
2026-05-05 -

重庆企业图像处理板
2026-05-05 -

质量图像处理板检测
2026-05-05 -
山西边海防视频压缩与传输多路
2026-05-05 -
信息化图像处理板好选择
2026-05-05 -

福建图像处理板供应
2026-05-05 -
山西专业图像标注什么价格
2026-05-05