eVTOL是指电动垂直起降飞行器,大力开展eVTOL试点,是对低空经济的强动力注入,而无人机正是这一领域的关键选择之一。无人机在低空经济中扮演者重要角色,随着应用领域的不断增多,未来无人机的数量将呈式增长,届时eVTOL起降中心将聚集众多各式各样的无人机,如何高效有序的让无人机彼此工作而不互相干扰是...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
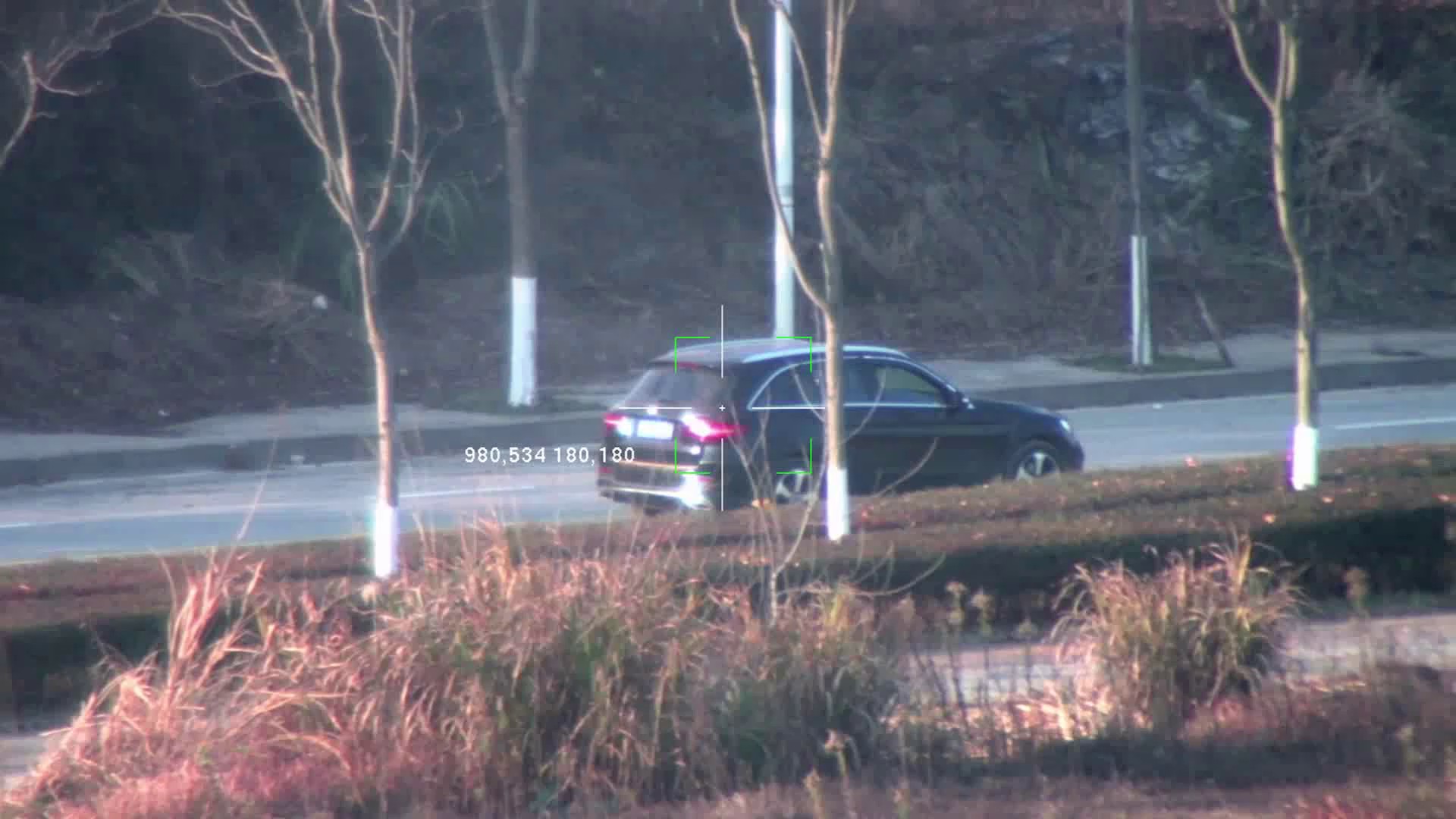
目标跟踪是计算机视觉研究领域的热点之一,并得到广泛应用。相机的跟踪对焦、无人机的自动目标跟踪等都需要用到了目标跟踪技术。另外还有特定物体的跟踪,比如人体跟踪,交通监控系统中的车辆跟踪,人脸跟踪和智能交互系统中的手势跟踪等。简单来说,目标跟踪就是在连续的视频序列中,建立所要跟踪物体的位置关系,得到物体完整的运动轨迹。给定图像首帧的目标坐标位置,计算在下一帧图像中目标的确切位置。在运动的过程中,目标可能会呈现一些图像上的变化,比如姿态或形状的变化、尺度的变化、背景遮挡或光线亮度的变化等。目标跟踪算法的研究也围绕着解决这些变化和具体的应用展开。有没有做全国产后跟踪版的公司?湖北智能化目标跟踪
目标跟踪
目标识别算法是一种深度学习算法,其聪明程度需要我们不断训练,这就得益于大量的图像标注,通过对车辆行驶环境的数据集的大量标注,能够让AI更加聪明,标注得越多,识别的精度就可能越高。但是大量的图像标注跟工作显然会耗费大量的时间精力。而慧视SpeedDP的出现很好地解决了这个问题。SpeedDP是一个深度学习AI算法训练开发平台,他能够通过现有的算法模型或者自训练一个算法模型,实现对新数据集的快速AI自动标注,以此反复,帮助使用者提升算法性能。能够有效节约大量的时间。江苏高性能目标跟踪慧视AI板卡能够凸显AI的智慧之能,变被动为主动,提供多种能主动预警的视频分析和人脸识别黑白名单管理。

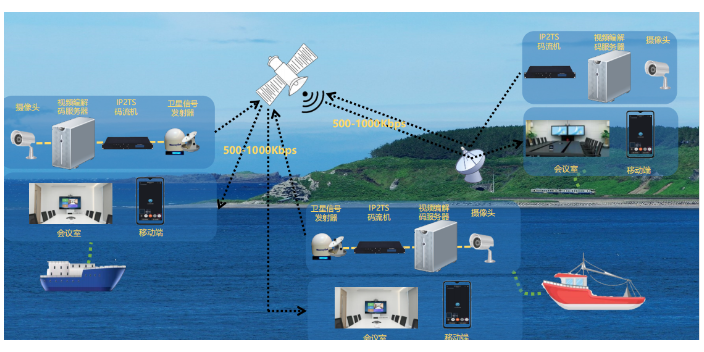
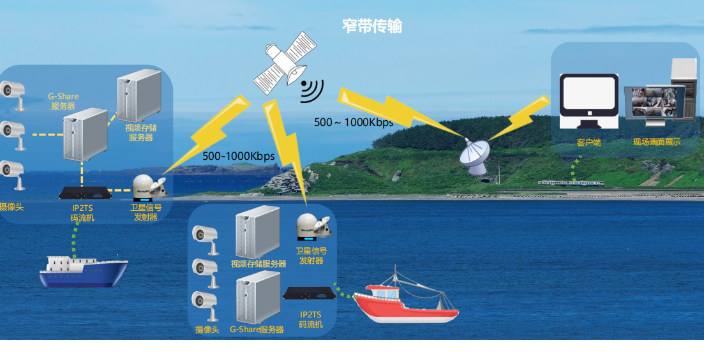
但这也遇到很多难点,通常情况下,视频回传的延迟大概在200ms左右,随着大量的弹打出,视频传输所需带宽就面临压力,如何在通信带宽有限的情况下,保证视频顺畅、清晰、无卡顿地传输,是分析改进这个工作需要解决的前期难点。针对于这个问题,慧视光电利用GS弱网高清音视频传输系统和RK3588打造的Viztra-HE030图像处理板结合,推出了低延迟低带宽图传解决方案。在一个窄带收发信道内,例如在信道有效带宽0.5Mb/s~2Mb/s内,多路视频和交互控制共用一对收发信道,信道支持数据透传,外部系统可以使用该信道,传输任意格式的数据;可实时调整视频码率,在低至500K带宽情况下依然可以回传清晰流畅的图像。可以使设备飞的更远、走的更远;可实现视频中继转发;能够基于H265实时视频编码;可实现基于视频流的“人在回路低延迟控制”。基于普通60帧相机,实现15ms的低延迟编解码,加上数据链传输延迟时间在30ms左右,目前业界前列。通用性强,使用更加灵活,适用更多应用场景;支持多路SDI视频在低至500K带宽情况下的同时传输(1080P60FPS),彻底解决“带宽苦恼”;整体时延约60ms(含相机、编解码、显示,不含传输),实现实时控制、实时打击。
小兴安岭的日常巡护,是构筑东北生态安全的必要措施,进入冬季,整个小兴安岭将处于冰雪覆盖,按照传统的巡检模式,危险且费力。整个小兴安岭森林覆盖率达到96%,只靠肉眼的观察,很容易错过死角空白区的潜在危险,因此,无人机上线了。将无人机智能化,在吊舱的基础上加装具备智能图像处理的板卡,再通过定制算法的植入,一个智慧“巡检员”就上线了。面对大森林这样复杂的环境,成都慧视开发的高性能AI图像处理板Viztra-HE030可以胜任,这块板卡采用了瑞芯微旗舰级芯片RK3588,能够输出6.0TOPS的算力,考虑到小兴安岭冬天寒冷的环境,这款板卡能够适应零下40℃的环境,长时间的户外工作不在话下。RK3399搭载AI智能算法,实现目标识别与跟踪。

无人机是巡检领域的空中巡检员,搭载智慧“眼”的无人机能够替代人工,实现自主巡检。无人机可以搭载红外光和可见光两种传感器,实现昼夜巡检也不是梦,一基杆塔*用十分钟的时间便可完成巡检工作。例如在电力巡检中,传统模式下,工人只能采用望远镜远程查看线路,不仅费眼睛,还费时间。同时,由于光线等外界因素的干扰,缺陷的确认也加大了难度,不得不背着安全带近距离校验,工人的安全也受到威胁。而无人机则可以在发现缺陷后,通过抵近观察的方式进行仔细查看,收集缺陷周围360°照片回去分析,不仅安全也高效率。RV1126图像处理板的目标识别能力突出。陕西目标跟踪检测
RK3588作为工业级图像处理板能够进行大量的目标识别信息处理。湖北智能化目标跟踪
通常,遮挡可以分为三种情况:目标间遮挡、背景遮挡、自遮挡。对于目标之间的相互遮挡,可以选择根据目标的位置和目标特征的先验知识来处理这一问题。而对于场景结构的导致的部分遮挡此方法则难以判断,因为难以辨认究竟是目标形状发生变化还是发生遮挡。所以,处理遮挡问题的通用方法是用线性或非线性动态建模方法对运动目标进行,并在目标发生遮挡时,预测目标的可能位置,一直到目标重新出现时再修正它的位置。可以用卡尔曼滤波器来实现估计目标的位置,也可以用粒子滤波对目标做状态估计。湖北智能化目标跟踪
与目标跟踪相关的文章

比较好的目标跟踪产品
- 浙江目标跟踪市场报价 2026-04-29
- 黑龙江高性能目标跟踪 2026-04-29
- 重庆目标跟踪推荐厂家 2026-04-29
- 河南移动目标跟踪 2026-04-29
- 山东目标跟踪哪里买 2026-04-29
- 人防目标跟踪报价行情 2026-04-29
- 工业目标跟踪好选择 2026-04-28
- 哪里有目标跟踪哪里好 2026-04-28
- 安徽目标跟踪解决 2026-04-28
- 辽宁国产目标跟踪 2026-04-28
- 四川目标跟踪诚信推荐 2026-04-27
- 云南光纤数据目标跟踪 2026-04-27
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
广西附近目标跟踪 2026-04-27 10:01:19长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的...
-
甘肃目标跟踪产品 2026-04-26 00:11:30多边形标注能够能够帮助我们标注一些规则复杂的物体,如动物、人、车、建筑物等,与矩形标注框等方法相比,多边形标注更能精确展示被标注物体的形状、大小以及实时形态,通过大量的多边形标注工作,能够更好的帮助我们提高算法模型的准确性和鲁棒性。传统的多边形标注方法中,标注者需要在物体的边缘上依次单击鼠标或使用绘...
-
光纤数据目标跟踪有哪些 2026-04-26 15:01:20深度学习技术,特别是神经网络,已经在图像和语音跟踪领域取得了不小的进展。这些技术可以应用于物联网设备,实现更加智能化的交互和控制。物联网、人工智能和大数据的融合正在开启一个智能化的新纪元。这种融合不仅推动了技术革新,还为各行各业带来了深刻的变革。随着技术的不断发展,这一融合将推动智能家居、智能城市、...
-
省时省力目标跟踪诚信推荐 2026-04-26 03:01:49这种智慧化的建设就是采用图像处理。在无人机内部安装图像处理板,这些图像处理板和相机、算法的有机结合就形成了无人机的智慧眼,有了这个智慧眼,无人机就能够对视野范围内的物体进行AI识别,从而自动完成避障、巡检等操作。成都慧视开发的小型化图像处理板Viztra-LE026就是专门为无人机设计的一款“智慧眼...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

云南边海防视频压缩与传输无损
2026-05-01 -
云南窄带视频压缩与传输可视化指挥
2026-05-01 -
四川视频产品价格合理
2026-05-01 -

河南电力运维视频压缩与传输提供商
2026-05-01 -

江西安保视频压缩与传输无损
2026-05-01 -
四川弱网视频压缩与传输多路
2026-05-01 -
湖北应急救援视频压缩与传输交互系统
2026-05-01 -

江西高清视频压缩与传输供应商
2026-05-01 -

重庆专业视频压缩与传输高清
2026-05-01