- 品牌
- 孝感岳能电子科技有限公司
- 型号
- 型号齐全
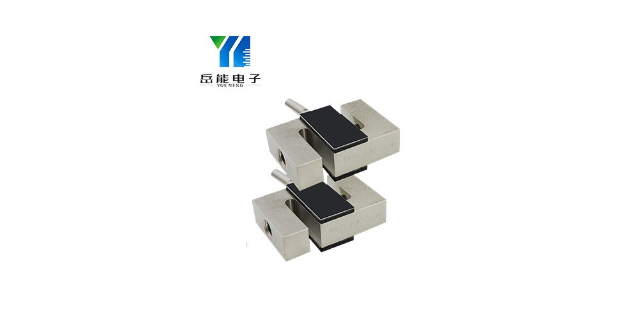
在搅拌设备中,S型拉力传感器可以用于监测混合物的重量。S型拉力传感器是一种常见的力传感器,它可以测量受力物体的拉力。在搅拌设备中,S型拉力传感器通常被安装在搅拌器的支撑结构上,用于测量搅拌器所受到的重力和惯性力。S型拉力传感器的工作原理是基于应变测量。当搅拌器受到重力和惯性力的作用时,传感器的弹性元件会发生微小的形变,这会导致传感器内部的电阻发生变化。通过测量电阻的变化,可以确定受力物体的拉力大小。为了监测混合物的重量,首先需要将搅拌器安装在支撑结构上,并将S型拉力传感器连接到搅拌器和支撑结构之间。当搅拌器开始工作时,传感器会感知到搅拌器所受到的重力和惯性力,并将这些力转化为电信号。接下来,这些电信号可以通过连接到传感器的数据采集系统进行采集和处理。数据采集系统可以将传感器输出的电信号转换为重量值,并显示在监控界面上。通过监控界面,操作人员可以实时了解混合物的重量变化情况。此外,S型拉力传感器还可以与其他传感器和控制系统进行集成,以实现更复杂的搅拌过程控制。例如,可以将S型拉力传感器的输出信号与搅拌器的转速传感器和温度传感器的信号进行综合分析,从而实现对混合物的精确控制。动态称重传感器的价格因品牌、性能、精度等因素而异,用户需要根据实际需求进行选购。北京皮带秤测力称重传感器设计

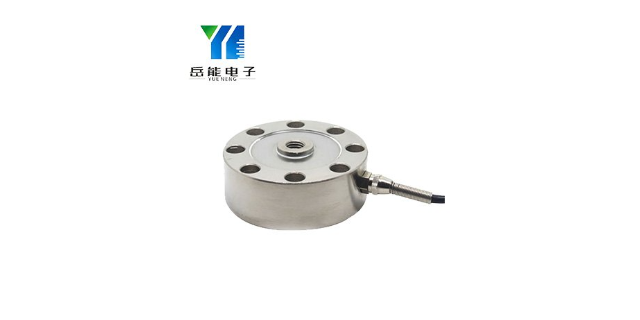
称重传感器在不同的测量方向上的性能可能会有所不同。这取决于传感器的设计和制造过程,以及所使用的测量原理。首先,我们需要了解称重传感器的工作原理。称重传感器通常基于力传感器的原理,通过测量物体施加在传感器上的力来确定物体的重量。传感器通常包含一个弹性元件,如弹簧或应变片,当物体施加力时,弹性元件会发生形变,这个形变会转化为电信号输出。在理想情况下,称重传感器在不同的测量方向上应该具有相同的性能。也就是说,无论是在垂直方向还是水平方向上施加力,传感器应该能够准确地测量出物体的重量。然而,在实际应用中,由于各种因素的影响,称重传感器的性能可能会有所差异。首先,传感器的设计和制造过程可能会导致性能差异。例如,传感器的结构和材料选择可能会影响其对不同方向上的力的敏感度。如果传感器在某个方向上的结构设计不合理或材料选择不当,可能会导致在该方向上的测量结果不准确。其次,传感器的校准和调试也会对性能产生影响。传感器需要经过精确的校准和调试过程,以确保在各个方向上的测量结果准确可靠。如果校准不当或调试不完善,可能会导致传感器在某些方向上的性能不一致。郑州称重传感器研发为了延长S型拉力传感器的使用寿命,应避免超载和长时间连续工作。
S型称重传感器是一种常用的称重装置,用于测量物体的重量或负荷。它的结构组成包括以下几个主要部分:1. 底座:底座是传感器的支撑部分,通常由金属材料制成,具有足够的强度和稳定性,以承受物体的重量和外部力。2. 弹簧:弹簧是S型称重传感器的中心组件之一。它通常采用金属材料制成,具有一定的弹性和变形能力。当物体施加在传感器上时,弹簧会发生弹性变形,产生相应的力。3. 载荷板:载荷板是连接物体和传感器的部分,通常位于传感器的顶部。它是一个平面结构,用于承载物体的重量,并将其传递给弹簧。4. 传感器体:传感器体是整个S型称重传感器的外壳,通常由金属或塑料材料制成。它的主要作用是保护内部组件,同时提供一个稳定的环境,以确保传感器的准确性和可靠性。5. 电阻应变片:电阻应变片是S型称重传感器的中心感应元件。它通常位于弹簧上,当弹簧发生变形时,电阻应变片也会发生相应的变化。通过测量电阻应变片的变化,可以确定物体施加在传感器上的力或重量。
校正称重传感器的零点漂移可以采取以下几种方法:1. 零点校准按钮:一些称重传感器上配备了零点校准按钮,通过按下按钮可以将传感器的输出信号归零。在进行校准之前,需要确保传感器没有受到外力的干扰,并且处于稳定的工作状态。2. 软件校准:一些高级的称重传感器可以通过软件进行零点校准。通过连接传感器到计算机或者使用特定的校准设备,可以对传感器进行校准参数的调整,以消除零点漂移。3. 机械调整:有些称重传感器可以通过机械调整来校正零点漂移。这通常需要使用特定的工具和技术,例如调整传感器的机械结构或者调整传感器与被测物体之间的接触力。4. 温度补偿:温度变化是导致称重传感器零点漂移的常见原因之一。一些高级的称重传感器具有温度补偿功能,可以根据环境温度的变化自动调整零点漂移。称重传感器是一种能够将质量或重力变化转换为电信号的装置。
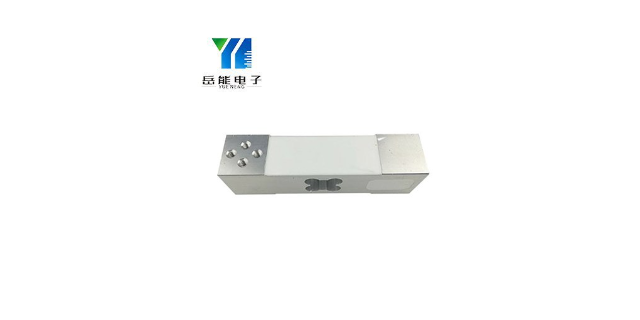
S型拉力传感器的线性度和重复性是评估其性能和精度的两个重要指标。首先,线性度是指传感器输出与输入之间的关系是否是线性的。在理想情况下,传感器的输出应该与输入成正比。然而,在实际应用中,由于制造和环境因素的影响,传感器的输出可能存在一定的非线性误差。线性度通常用百分比或者较大允许误差来表示。例如,一个线性度为±0.1%的传感器,表示在整个测量范围内,其输出与输入之间的较大误差不超过输入值的0.1%。为了评估传感器的线性度,通常会进行线性回归分析。通过将一系列已知输入值施加到传感器上,并记录相应的输出值,可以得到一个线性回归方程。通过分析回归方程的斜率和截距,可以评估传感器的线性度。其次,重复性是指在相同输入条件下,传感器多次测量得到的输出值之间的差异。重复性通常用标准偏差或者较大允许误差来表示。例如,一个重复性为±0.05%的传感器,表示在相同输入条件下,多次测量得到的输出值之间的较大差异不超过输入值的0.05%。为了评估传感器的重复性,通常会进行多次测量,并计算测量值之间的标准偏差或者较大差异。较小的标准偏差或较大差异表示传感器的重复性较好。称重传感器可以用于汽车、飞机等交通工具的载重监测和安全保障。重庆称重传感器生产
称重传感器的精度高,可以实现微克级别的重量检测。北京皮带秤测力称重传感器设计
称重传感器在动态称重和静态称重中有一些不同之处。动态称重是指在物体处于运动状态下进行称重,而静态称重是指在物体处于静止状态下进行称重。以下是动态称重和静态称重之间的几个主要区别:1. 传感器设计:动态称重传感器需要具备较高的采样速率和响应速度,以便准确地测量物体在运动过程中的重量变化。静态称重传感器则可以采用较低的采样速率和响应速度,因为物体处于静止状态时重量变化较小。2. 精度要求:由于动态称重涉及到物体的运动,因此对称重传感器的精度要求较高。传感器需要能够快速、准确地测量物体的重量变化,以便及时反馈给控制系统。而静态称重传感器的精度要求相对较低,因为物体处于静止状态时,重量变化较小且较稳定。3. 抗干扰性能:动态称重传感器需要具备较好的抗干扰性能,以应对物体在运动过程中可能产生的振动、冲击和外界干扰等因素。传感器需要能够准确地测量物体的重量变化,而不受外界干扰的影响。静态称重传感器的抗干扰性能要求相对较低,因为物体处于静止状态时,外界干扰较少。北京皮带秤测力称重传感器设计
- 北京电压称重传感器服务 2024-09-16
- 郑州地磅称重传感器定制 2024-09-16
- 福州单点称重传感器定制 2024-09-16
- 武汉单点称重传感器哪家好 2024-09-16
- 南京轮辐称重传感器定制 2024-09-15
- 南京耐高温称重传感器厂家 2024-09-15
- 沈阳轮辐称重传感器采购 2024-09-15
- 郑州反应釜配料称重传感器订购 2024-09-15
- 南昌S型拉力称重传感器销售 2024-09-14
- 南京10kg称重传感器厂家 2024-09-14
- 成都压力称重传感器 2024-09-13
- 福州机械手测力传感器 2024-09-13