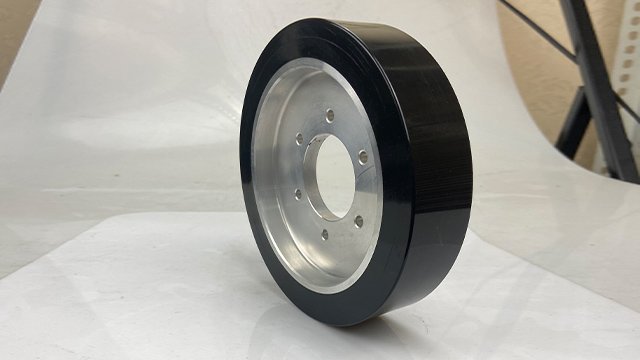
驱动轮的选择:AGV机器人驱动轮常见的多采用聚氨酯包胶材质或者橡胶驱动轮面。聚氨酯包胶轮具有耐磨,减噪,防滑能力,适应于长时间高速运转,需要有高回弹性和高散热性。橡胶驱动轮面拥有相对聚氨酯更强的抓地力和防滑等特点,橡胶轮可以做沟槽设计避免打滑,在很多应用也得到大规模的使用。AGV驱动轮(聚氨酯包胶材质或者橡胶驱动轮面)因防滑需求而在轮品表面添加防滑纹路,花纹设计,可以提升主动轮的摩擦力,防止打滑。橡胶驱动轮面的花纹有较多的选择,常见轮面的有:无花纹、交叉直线型、直线条、凹坑型、同向齿型、纵向花纹、纵横兼有花纹、越野花纹、混合花纹等 驱动轮能够提供更稳定的行驶体验。随动轮供应

计算万向轮承载重量:为了能够计算出各种万向轮需要的载重能力,必须知道运输设备自重、荷重和所用单轮和万向轮的数量。一个单轮所需的载重能力计算如下:T=(E+Z)/M×N:T=单轮或万向轮所需承载重量;E=运输设备的自重;Z=荷重;M=所用单轮和万向轮的数量;N=安全系数(约1.3—1.5);决定轮径大小:通常万向轮直径愈大愈容易推动,荷重能力也愈大同时也较能保护地面不受损坏,轮径大小的选择首先应考虑承载的重量和荷重下搬运车的起动推力来决定。转动灵活性:单轮越大转动就越省力,滚针轴承能载较重的负载,转动时阻力较大:单轮安装上滚珠轴承,能承载较重的负荷,转动更轻便,灵活宁静非标定制脚轮定制万向轮具有高承载能力和低能耗的特点。

AGV底盘空间有限,必须得测量和计算好脚轮的旋转半径,不要让几个轮子互相形成碰撞和干扰。工业避震结构设计保证避震性和稳定性非常重要,有“弹簧减震”的从动轮可以保障从动轮和驱动轮在一个平面上,避震轮面材质,确保驱动轮不打滑。动轮耐用性、静音性(不超过40分贝)也是重要的考量因素。灵活性也非常重要,因为AGV的动力高度依赖驱动轮,从动轮的灵活性影响着驱动轮动力系统。尤其是当AGV前进直接后退或左右拐弯时,从动轮流畅性不佳,AGV就容易遇到偏摆,导致移动出现问题,甚至会导致运输的货物掉落。详情咨询屹上脚轮
AGV驱动轮是什么意思?聚氨酯(PU)俗称优力胶、弹簧胶。适合在多种地面上使用。大规模用于医疗、食品加工、工厂搬运、仓储物流、机械制造等行业。PU(热塑性策氨酯弹性体-TPU)是一种介于硬塑料和橡胶之间的弹性体,其优良的综合性能是普通的塑料和橡胶所不具备的。脚轮一般有两种类型注塑PU轮和浇铸PU轮。注塑PU轮:无毒,无味,不褪色,能保护地板,无痕,吸收震动,具有弹性,附摩擦,有良好的耐油、耐水(如果长时间放宣在水中或湿度大的环境中可能会加速劣化)和耐环境等性能,不耐化学药品(弱酸、碱)但只在特定条件下耐热水和水蒸汽。此外,它的滚动阻力小。适用温度范围:-35C至+80°C(在低于-20°C的环境温度下产品有脆性),短时较高温度+90°C。在高于+35°C的环境温度下承载能力降低。 驱动轮的维护和修理相对从动轮更为简单。

聚氨酯(PU)俗称优力胶、弹簧胶。适合在多种地面上使用。用于医疗、食品加工、工厂搬运、仓储物流、机械制造等行业。PU(热塑性策氨酯弹性体-TPU)是一种介于硬塑料和橡胶之间的弹性体,其优良的综合性能是普通的塑料和橡胶所不具备的。脚轮一般有两种类型注塑PU轮和浇铸PU轮。注塑PU轮:无毒,无味,不褪色,能保护地板,无痕,吸收震动,具有弹性,附摩擦,有良好的耐油、耐水(如果长时间放宣在水中或湿度大的环境中可能会加速劣化)和耐环境等性
屹上脚轮,设计精良,经久耐用。南京聚气酷工业轮设计
AGV驱动轮,让您的AGV更加高效快速。随动轮供应
智能驱动轮技术的应用与发展智能驱动轮技术是指将传统的机械驱动轮升级为具有智能化功能的驱动轮,通过集成传感器、控制器、执行器等元件,实现对车辆运动状态的实时监测和控制。智能驱动轮技术的应用范围广,包括智能物流、智能交通、智能制造等领域,具有提高效率、降低成本、提升安全性等优势。智能驱动轮的工作原理和特点智能驱动轮的工作原理是通过集成传感器、控制器、执行器等元件,实现对车辆运动状态的实时监测和控制。智能驱动轮具有以下特点:(1)智能化:智能驱动轮集成了传感器、控制器、执行器等元件,实现对车辆运动状态的实时监测和控制,具有智能化的特点。(2)高效性:智能驱动轮可以实现对车辆运动状态的实时监测和控制,提高了车辆的运行效率。(3)安全性:智能驱动轮可以实现对车辆运动状态的实时监测和控制,提高了车辆的安全性。(4)节能性:智能驱动轮可以实现对车辆运动状态的实时监测和控制,降低了车辆的能耗。 随动轮供应
在行驶过程中,智能控制系统还能够根据车辆的状态和路况,智能调整车速和转向角度,保证车辆的稳定性和...
【详情】主动轮,智能驱动未来!主动轮是一种全新的智能驱动技术,它能够实现车辆的主动控制和自主导航,为人们的出...
【详情】驱动轮的选择:AGV机器人驱动轮常见的多采用聚氨酯包胶材质或者橡胶驱动轮面。聚氨酯包胶轮具有耐磨,减...
【详情】