快速对中校正仪通过多种方式降低了运维人员的技能要求,具体如下:操作界面直观简洁:许多快速对中校正仪配备了图形化的操作界面和触摸屏,以直观的方式显示测量数据和操作指引。例如AS轴对中校准测量仪,其,以绿、黄、红三色直观标记轴同心度偏差范围,操作人员无需复杂培训,即可清晰掌握设备状态。自动化...
快速对中校正仪基本参数
- 品牌
- HOJOLO,LEAKSHOOTER,SYNERGYS
- 型号
- AS500
- 类型
- 激光对中仪
- 重量
- 0.8
- 产地
- 苏州
- 厂家
- 汉吉龙测控技术有限公司
快速对中校正仪企业商机
HOJOLO快速对中校正仪的校准数据可以进行多种分析和处理,具体如下:对中偏差分析:仪器可自动计算出径向偏差和轴向偏差,并显示在屏幕上。例如,在缓慢旋转设备轴时,传感器依次经过0°、90°、180°、270°等特定位置,仪器会在数据稳定后记录数据,并计算出相应偏差,帮助用户了解设备轴系的对中情况。振动分析:HOJOLO部分型号的对中校正仪集成专业级振动分析模块,配备ICP磁吸式振动传感器,可同步获取振动速度、加速度、位移及crest因子等关键参数。通过快速傅里叶变换(FFT)技术,将振动时域信号转换为频谱,从而精细识别设备运行中的多种典型故障。如轴系不对中时,1倍转速频率(1X)幅值会升高;轴承磨损则会在特定频段出现如BPFO(外圈故障特征频率)等特征频率。趋势监测预警:该仪器支持连续振动数据记录与历史对比,通过趋势曲线直观呈现振动幅值变化,当振动值超过预设阈值时自动报警,提前预警潜在故障。用户可以根据趋势分析,及时采取维护措施,避免设备故障的发生。垫片计算:针对垂直机器,HOJOLO对中校正仪的垫片计算功能可实现即时校正。仪器会根据测量数据生成调整建议,显示需要在电机脚下垫垫片的厚度或电机需要移动的方向和距离。 快速对中校正仪:多设备兼容,校准无需频繁换工具。自主研发快速对中校正仪制造商

经过提纯的有效数据,会传输至仪器的**运算单元(通常为高性能MCU或FPGA芯片),通过“对中偏差**算法”实时计算出**终的偏差值,这是实现“实时显示”的**逻辑:1.**算法:基于“两点法”或“多点法”的偏差计算对中校正的本质是通过“轴系上两个点的位置”推算出“整个轴的偏差”,主流采用两类成熟算法,运算速度均在毫秒级(<10ms),确保实时性:两点法(简化算法):在主动轴、从动轴上各取1个测量点(共2个点),通过传感器采集这两个点在“水平、垂直”方向的位置坐标,再根据“两轴中心距”(提前输入仪器),计算出“径向偏差”(两轴中心点的距离差)和“角度偏差”(两轴轴线的夹角)。例:若主动轴测量点坐标为(X1,Y1),从动轴测量点坐标为(X2,Y2),中心距为L,则径向偏差=√[(X2-X1)²+(Y2-Y1)²],角度偏差=arctan[(Y2-Y1)/L](垂直方向角度)。多点法(高精度算法):在主动轴、从动轴上各取3-6个测量点(沿轴周向均匀分布,如0°、90°、180°、270°),采集所有点的位置坐标,通过“**小二乘法”拟合出“主动轴轴线”和“从动轴轴线”的空间直线方程,再计算两条直线的“平行偏移量(径向偏差)”和“夹角(角度偏差)”。耦合快速对中校正仪视频快速对中校正仪:智能校准。

HOJOLO快速对中校正仪采样数据与偏差的关联仪器通过旋转两轴(通常旋转360°),采集不同角度下(如0°、90°、180°、270°)的径向位移数据,假设采集到主动轴与从动轴在“联轴器近端”(靠近联轴器的支撑点)和“联轴器远端”(远离联轴器的支撑点)的位移差,通过以下公式计算偏差:角度偏差计算:α=arctan[(δ远-δ近)/L]×(180/π),其中L为两支撑点之间的距离(轴长);平行偏差计算:δ=(δ远+δ近)/2(取近端与远端偏差的平均值,反映整体平行偏移)。3.调整量计算:从偏差到可操作值以“电机(主动轴)与泵(从动轴)对中”为例,电机通过前脚和后脚固定在底座上,算法根据偏差值计算前脚和后脚的调整量:若存在角度偏差α,则前脚调整量=α×L前/(180/π),后脚调整量=α×L后/(180/π)(L前为前脚到联轴器的距离,L后为后脚到联轴器的距离);若存在平行偏差δ,则前脚与后脚调整量相同=δ(需同时升高/降低前脚和后脚,确保两轴平行)。上述公式均由仪器内置算法自动执行,运维人员无需手动计算,*需根据仪器输出的“前脚调整XXmm、后脚调整XXmm”直接操作,这也是其“降低技能要求”的**逻辑之一。
第四步:可视化模块实时输出,直观呈现偏差运算得出的“径向偏差、角度偏差”结果,会实时传输至仪器的显示控制模块,通过“图形化+数字化”的方式直观呈现,让运维人员“一眼看懂”:硬件支撑:高刷新率显示屏幕仪器通常配备“TFT彩色液晶屏”或“OLED屏”,刷新率≥60Hz(每秒显示60帧画面),确保偏差值和图形的“实时刷新无延迟”——避免因屏幕刷新慢导致的“调整后偏差值滞后显示”(如调整已到位,但屏幕仍显示超标)。软件呈现:多维度可视化设计显示界面经过工业设计优化,兼顾“直观性”和“信息密度”,常见呈现形式包括:数字实时显示:用大号字体直接显示“当前径向偏差(如)”“角度偏差(如°)”,并标注“合格阈值”(如绿色字体显示“≤”),偏差超标时自动变红预警。图形动态标注:用“轴系示意图”实时标注偏差方向(如用红色箭头指向“左偏”方向),或用“柱状图”对比“当前偏差”与“合格阈值”(偏差缩小,红色柱同步缩短)。调整指引提示:部分**型号会实时计算“调整量”(如“电机前脚需垫高”),并在屏幕底部弹出文字提示,实现“边看偏差、边做调整”。 快速对中校正仪:智能存储校准数据,便于追溯管理。

快速对中校正仪之所以能实现“高效校准、节省成本”,**在于其通过技术优化缩短校准周期、减少资源浪费,并从长期运维角度降低设备损耗,具体可从以下维度拆解其价值逻辑:一、“高效校准”的**实现路径:从“耗时操作”到“快速精细”传统对中校准(如百分表法、塞尺法)依赖人工反复调整、读数,流程繁琐且易受人为误差影响,而快速对中校正仪通过技术升级大幅压缩时间成本,具体体现在:自动化数据采集,减少人工干预仪器内置高精度传感器(如激光位移传感器、加速度传感器),可自动捕捉轴系的径向、角向偏差,无需人工逐点测量、记录。例如部分型号能在30秒内完成数据采集,相比传统方法(通常需1-2小时)效率提升120倍以上,尤其适合生产线多设备批量校准场景。 快速对中校正仪使用方法。汉吉龙测控快速对中校正仪特点
快速对中校正仪的校准数据可以通过哪些方式进行传输?自主研发快速对中校正仪制造商
第三步:信号处理与坐标换算接收单元采集的“光斑坐标数据”是原始电信号,需通过仪器内置的微处理器(MCU/CPU)进行信号处理与坐标换算,将“光斑偏移量”转化为“轴系偏差量”,**步骤包括:信号滤波:通过数字滤波算法(如卡尔曼滤波、滑动平均滤波)去除环境干扰(如振动、光线变化)导致的噪声信号,保留真实的光斑偏移数据。坐标映射:仪器出厂前已通过校准,建立“光斑在感光芯片上的坐标偏移量”与“两轴实际偏差量”的映射关系(例如:光斑在X轴偏移1mm,对应两轴径向偏差)。微处理器根据该映射关系,将实时采集的光斑坐标换算为两轴的径向位移值(平行偏差相关)和角度倾斜值(角度偏差相关)。单位统一:自动将换算后的偏差量转换为工业常用单位(如mm、mil、度、分),避免人工换算误差。自主研发快速对中校正仪制造商
与快速对中校正仪相关的文章

HOJOLO快速对中校正仪维修
- 常见快速对中校正仪怎么样 2026-05-09
- 汉吉龙测控快速对中校正仪公司 2026-05-09
- 欧洲快速对中校正仪特点 2026-05-08
- 原装进口快速对中校正仪制造商 2026-05-07
- 常见快速对中校正仪使用方法 2026-05-03
- 经济型快速对中校正仪厂家 2026-05-02
- AS快速对中校正仪定制 2026-05-01
- 质量快速对中校正仪厂家 2026-04-29
- 教学快速对中校正仪技术参数 2026-04-29
- synergys快速对中校正仪哪里买 2026-04-28
- synergys快速对中校正仪批发 2026-04-26
- 进口快速对中校正仪怎么样 2026-04-21
与快速对中校正仪相关的产品



与快速对中校正仪相关的新闻
-
红外快速对中校正仪视频 2026-04-16 12:02:37振动分析原理:一些快速对中校正仪配备振动分析模块,如 AS 轴对中校准测量仪配备 ICP/IEPE 磁吸式加速度计,可同步精细采集振动速度、加速度及 CREST 因子等关键参数。通过快速傅里叶变换(FFT)技术,将采集到的振动时域信号转换为频谱,从而精细识别设备运行中的多种典型故障。例如,轴系不对中...
-
红外快速对中校正仪怎么用 2026-04-16 08:03:34汉吉龙 -快速对中校正仪实现“偏差实时显示”的**,是通过高精度传感器采集轴系空间位置数据,经**算法实时运算处理,再将结果以可视化形式输出,本质是“数据采集→信号处理→运算分析→可视化呈现”的闭环实时响应过程。其具体原理可拆解为以下4个关键环节:一、第一步:高精度传感器实时采集轴系位置数据对中校正...
-
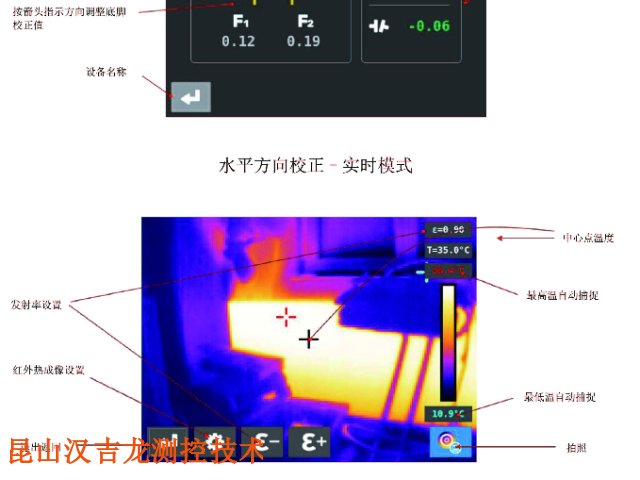
机械快速对中校正仪使用视频 2026-04-16 17:07:42温度补偿技术:AS校正仪内置高精度温度传感器,精度可达±℃,可实时监测环境温度变化。结合动态校准算法,自动补偿设备运行中因热胀冷缩产生的尺寸变化,在-20℃~50℃的宽泛环境温度区间内,始终稳定输出高精度测量结果。例如,在化工高温泵运行时,能通过双激光束实时监测设备热膨胀,自动修正冷态对...
-
国产快速对中校正仪价格 2026-04-15 02:02:30第三步:信号处理与坐标换算接收单元采集的“光斑坐标数据”是原始电信号,需通过仪器内置的微处理器(MCU/CPU)进行信号处理与坐标换算,将“光斑偏移量”转化为“轴系偏差量”,**步骤包括:信号滤波:通过数字滤波算法(如卡尔曼滤波、滑动平均滤波)去除环境干扰(如振动、光线变化)导致的噪声信号,...
与快速对中校正仪相关的问题
新闻资讯
产品推荐
-

三合一轴心激光校正仪找正方法
2026-05-23 -

耦合轴心激光校正仪价格
2026-05-23 -

经济型轴对中校准测量仪企业
2026-05-23 -

振动法兰联轴器对中仪连接
2026-05-23 -
机械角度偏差测量仪现状
2026-05-23 -

教学轴心激光校正仪写论文
2026-05-23 -

激光轴对中校准测量仪怎么样
2026-05-23 -

汉吉龙角度偏差测量仪电话
2026-05-23 -

进口便携同心度检测仪批发
2026-05-23