人工智能技术在海洋牧场无人船的决策系统中得到广泛应用,明显提升了船舶的自主作业能力。通过深度学习算法,无人船可对大量的环境监测数据、生物活动影像进行分析,实现鱼群饥饿等级识别、死鱼模态特征判断等智能功能。在智能投饵场景中,系统可结合鱼群长势预测模型与实时监测数据,自动调整投喂时间与投喂量;死鱼清理作业中,通过识别死鱼的水纹变化特征,引导水下设备完成精细清理。人工智能技术的融入,使海洋牧场无人船从“被动执行指令”向“主动智能决策”转变,为无人值守养殖模式的实现奠定了基础。无人船喷水推进具有推进效率高、抗空泡性强、附体阻力小、操纵性好、传动轴系简单等常规螺旋桨不及的优点。一体化海洋牧场无人船工厂直销
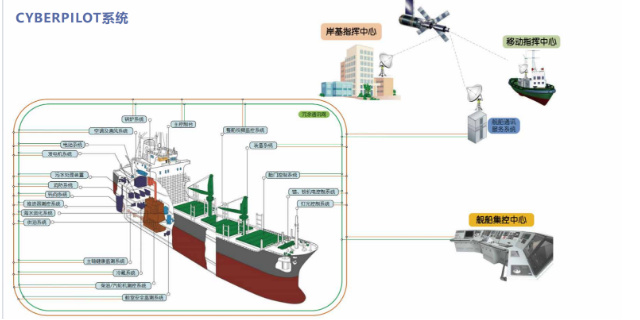
海洋牧场无人船的动力系统设计需兼顾作业续航与环境适应性,通常采用燃油或电力作为动力源,部分高级机型可实现油电混合驱动。电力驱动模式具有噪音低、污染小的优势,适用于近岸生态敏感型海洋牧场作业;燃油驱动则具备续航里程长、动力强劲的特点,更适合深远海长时间作业。动力系统需为船舶航行提供稳定的推进力,同时为感知设备、监测仪器、通信系统等提供持续的电力支持。其设计需充分考虑海洋环境的特殊性,具备良好的防水、防腐蚀性能,以适应高湿度、高盐雾的海上作业环境,保障设备长期稳定运行。一体化海洋牧场无人船工厂直销耿博士围绕人工智能的和无人自主驾驶在船泊方面的应用情况展开了详细的介绍,船舶智能化改造。

海洋牧场无人船积累的海量数据,通过算法模型处理后可转化为具体的管理决策建议。例如,将连续一周的水温、溶解氧数据与鱼类进食量对比分析,能得出比较好投喂时段;结合洋流方向与网箱位置数据,可优化网箱布局以减少鱼类应激反应。这些数据还能辅助判断养殖周期,当监测到鱼类平均体重达到预设阈值时,系统会自动提醒捕捞时间,避免过度养殖导致的资源浪费。对于多区域牧场,无人船可汇总各区域数据,生成横向对比报告,帮助管理人员发现不同区域的养殖差异,针对性调整管理策略。
海洋牧场无人船在设备投放作业中展现出高效的作业能力,可搭载水下机器人、监测浮标等设备抵达指定作业区域完成精细投放。作业前,操作人员通过系统规划投放路线与投放点坐标,无人船借助高精度定位系统抵达目标区域后,通过机械臂或主用投放装置将设备平稳放入海中。投放过程中,船舶的稳定控制系统可抵消海况扰动,确保设备投放的准确性;水下摄像头实时回传投放画面,便于操作人员确认投放效果。这种作业模式避免了人工投放过程中设备碰撞、投放偏差等问题,提升了设备投放的效率与安全性,为海洋牧场的信息化建设提供设备部署支撑。小豚无人船喷水推进器得到过众多事业单位合作伙伴的认可。
海洋牧场无人船的抗腐蚀设计是适应海上作业环境的关键技术要求,船体与设备需采用耐腐蚀性强的材料与防护工艺。船体结构多选用不锈钢、铝合金等耐蚀材料,表面采用防腐涂层处理,增强对海水盐雾、微生物腐蚀的抵抗能力;设备接口采用密封设计,防止海水渗入造成电路短路或部件损坏;动力系统、通信系统等中心组件配备专门的防腐罩,进一步提升防护等级。良好的抗腐蚀设计可延长海洋牧场无人船的使用寿命,降低设备维护成本,确保其在长期海上作业中保持稳定的性能。海洋牧场管理者借助小豚智能无人船,实现了对养殖区域生态环境的保护。一体化海洋牧场无人船工厂直销
目前,无人船喷水推进器正朝着单机功率50000KW以上功率的大型化、船体推进器一体化、矢量控制方向发展。一体化海洋牧场无人船工厂直销
编队控制技术的应用,使多艘海洋牧场无人船可协同完成复杂作业任务,提升整体作业效率。通过通信系统构建的编队网络,各船舶可实现位置信息共享、作业指令同步,根据预设的作业规划完成分区作业、接力作业等协同模式。例如在大规模海洋牧场的投饵作业中,多艘无人船可按预设航线分区投喂,避免作业重叠与遗漏;环境监测任务中,编队船舶可实现监测区域的全覆盖扫描,缩短监测周期。编队控制技术需解决多船之间的避碰协调、指令同步等中心问题,依赖高精度定位与高效通信技术的支撑,是海洋牧场无人船规模化应用的重要技术方向。一体化海洋牧场无人船工厂直销