自动化行业中的气缸的能效优化方法与节能措施提升气缸的能效可从气源处理、运行控制等方面入手。采用变频空压机提供匹配的气源压力,避免压力过高造成的能量浪费;安装节能阀在气缸停止运动时切断气源,减少无功能耗;选用低摩擦气缸,降低运动过程中的能量损失。在间歇工作的生产线中,通过程序控制气缸的待机状态,可节省 30% 以上的压缩空气消耗。此外,定期清理过滤器和干燥器,保证气源洁净度,也能减少因气路阻力增加导致的能耗上升。能够快速启动和停止,提高设备的工作效率。海南气缸的种类

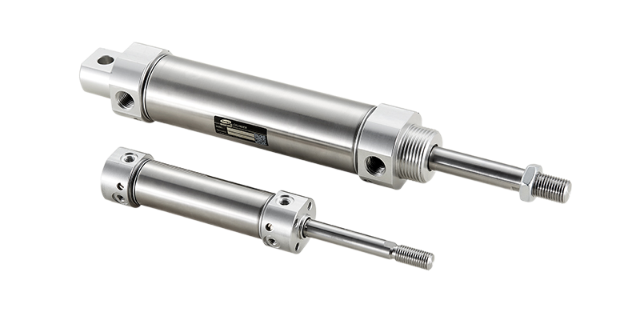
气动气缸的基础原理与**构造气缸作为气动系统的执行终端,其工作原理基于帕斯卡定律,通过压缩空气在活塞两侧产生压力差实现直线往复运动。典型结构包括铝合金缸筒、活塞、活塞杆及密封组件,其中密封技术直接影响气缸的寿命与能效。例如,SMC 的 CA2B 系列采用 PTFE 涂层密封环,摩擦系数降低 30%,***提升了响应速度与耐久性。双作用气缸通过两端交替供气实现双向驱动,而单作用气缸则依赖弹簧复位,适用于单向推力需求场景,如自动门控制。气缸新报价气缸的选择需要考虑负载大小和工作环境。
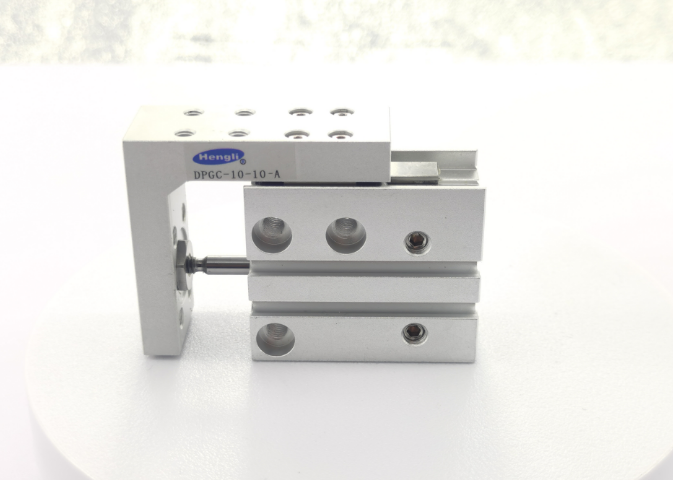
气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。
摆动气缸的工作原理与角度控制摆动气缸通过压缩空气驱动活塞或叶片旋转,输出一定角度的摆动运动,常见的有齿轮齿条式和叶片式两类。齿轮齿条式摆动气缸通过齿条与齿轮的啮合将直线运动转化为旋转运动,可实现 0°~360° 任意角度的调节;叶片式摆动气缸则利用叶片在缸体内的旋转直接输出扭矩,通常摆动角度小于 270°。在装配机器人的腕部关节,摆动气缸可精细控制抓取机构的旋转角度;在阀门自动化控制中,其快速响应能力可实现阀门的迅速启闭。节能高效是薄型气缸的显效优势之一。

特殊功能气缸气液阻尼缸:气压驱动 + 液压阻尼调速,运动平稳(无冲击),速度可调(0.5~500mm/s),适合精密送料、压力装配(如轴承压装)。冲击气缸:通过瞬间释放高压气体产生高速冲击(速度可达 10m/s 以上),冲击力大,用于冲压、打孔、破碎(如小型金属件冲孔)。夹紧气缸:活塞杆端部带夹紧爪(如杠杆式、肘节式),快速夹紧工件,自锁性好(断电 / 断气不松夹),用于机床夹具、焊接定位。真空气缸:活塞杆端部集成真空吸盘,兼顾气动驱动与真空吸附,用于轻薄物料(如纸张、薄膜)的搬运。三、按安装方式分类固定式:通过法兰(前端 / 后端法兰)、脚座(轴向 / 径向脚座)固定在设备上,适合负载方向与活塞杆轴线一致的场景(如水平推料)。摆动式:通过耳环(单耳环 / 双耳环)、轴销安装,允许气缸随负载轻微摆动(±5°),抵消安装偏差,适合倾斜推料、翻转机构。嵌入式:缸体嵌入设备凹槽内,节省空间,用于小型自动化设备(如电子元件装配机)。气液增压气缸提供大推力。康茂盛气缸电线
拉杆气缸的可靠性高,故障发生率低。海南气缸的种类
物流仓储滚筒分拣机挡停Φ40mm气缸推动挡板弹出,响应时间0.2s,承受包裹冲击力2000N。IP65防护抵抗粉尘,日均动作5万次。AGV货叉升降双Φ100mm气缸同步举升1吨货物,机械锁紧装置防止断电下滑。磁耦传感器实时反馈高度位置,误差±2mm。输送带张紧调节Φ32mm气缸自动调整惰轮位置,张力设定范围100-500N。压力传感器闭环控制,适应不同重量纸箱传输。物流仓储滚筒分拣机挡停Φ40mm气缸推动挡板弹出,响应时间0.2s,承受包裹冲击力2000N。IP65防护抵抗粉尘,日均动作5万次。AGV货叉升降双Φ100mm气缸同步举升1吨货物,机械锁紧装置防止断电下滑。磁耦传感器实时反馈高度位置,误差±2mm。输送带张紧调节Φ32mm气缸自动调整惰轮位置,张力设定范围100-500N。压力传感器闭环控制,适应不同重量纸箱传输。海南气缸的种类