自主导航是无人船艇的主要功能之一,其依赖SLAM(同步定位与地图构建)技术实现未知水域的实时建模。通过融合GPS、惯性导航和视觉里程计数据,船艇可精确计算自身位置并动态修正轨迹。避障系统采用分层决策机制:初级避障通过规则算法(如国际海上避碰规则COLREGS)处理静态障碍;高级避障则引入机器学习模型,预测其他船舶的运动意图并生成协同路径。例如,在繁忙航道中,无人船艇可通过AIS信号识别周边船只的航向与速度,自动保持安全距离。部分先进型号还具备抗风浪能力,采用闭环控制系统调节艇身姿态,确保在4级海况下稳定航行。这些能力明显提升了无人船艇在复杂环境下的可靠性与适应性。无人船艇在海洋探索中发挥着越来越重要的作用。上海多功能无人船艇修理
未来无人船艇将向集群协作、跨域协同及绿色化方向演进。集群技术通过多艇组网实现任务分配与协同作业,例如在海洋科考中,可由母船释放数十艘微型无人艇组成探测阵列,大幅提升数据覆盖范围。跨域协同指无人船艇与无人机、水下机器人联动,构建“空-水-岸”一体化监测网络,适用于边境巡逻或生态调查。绿色化设计则聚焦低功耗与环保材料,如采用氢燃料电池或生物降解复合材料。同时,边缘计算技术的应用将使部分数据处理任务前置到船载终端,减少对云端依赖。随着人工智能与物联网技术的渗透,无人船艇的功能边界将持续扩展,成为智慧水域管理的关键节点。辽宁警用巡逻无人船艇服务小豚无人船喷水推进器船舶推进器,它的作用是将船舶动力装置提供的。
无人船艇在环保监测、水利巡查、海洋测绘等领域展现出广泛的应用潜力。在环保领域,搭载水质传感器的无人船艇可自动采集pH值、溶解氧、重金属含量等参数,形成高精度污染分布图,为生态治理提供数据支撑。水利部门利用其进行河道巡检,通过三维声呐扫描识别堤坝裂缝或淤积问题,比传统人工巡检效率提升60%以上。海洋测绘中,无人船艇结合多波束测深仪,可高效完成港口航道或海底地形测绘,作业精度达到厘米级。此外,在应急救援场景中,无人船艇能快速投递救生设备或进入危险水域搜救,降低人员安全风险。这种多场景适配性推动了水利、环保等行业向智能化转型,优化了资源调配与作业模式。
在应急救援场景中,东莞小豚智能的无人船艇发挥着关键作用。当发生洪涝灾害时,水域情况复杂危险,救援人员难以直接进入。此时,无人船艇可迅速投入使用,它能凭借灵活的机动性,在湍急水流和漂浮杂物中穿梭。搭载的生命探测设备,能在大面积水域中快速搜索受困人员,为救援行动提供精细位置信息。而且,无人船艇还可携带救援物资,如救生圈、食物等,直接运送到被困人员附近,有效提高救援效率,成为应急救援行动中不可或缺的重要力量,为保障人民生命财产安全贡献力量。小豚智能自主研发了小豚动力、小豚智控以及小豚智讯系列等重要部件。
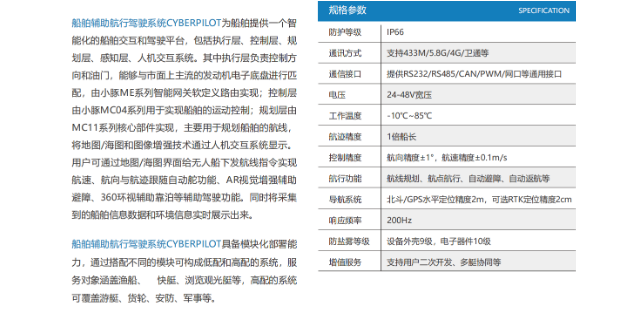
无人船艇是一种通过自主导航或远程控制实现水上作业的智能化装备,其主要技术包括环境感知、路径规划、运动控制和通信传输等模块。环境感知系统通常由雷达、激光雷达、摄像头及多普勒声呐组成,能够实时采集水域的障碍物分布、水流速度和水深数据;路径规划算法则基于感知信息生成比较好航行路线,确保避障与任务执行的协同性。运动控制模块通过调节推进器和舵机角度,实现航向、航速的精细调整。通信系统支持4G/5G、卫星或无线电传输,保障岸基指挥中心与船艇的实时数据交互。此外,无人船艇的能源系统多采用锂电池或太阳能混合供电,以满足长时间作业需求。这些技术的集成使无人船艇能够适应测绘、巡逻、水质监测等多样化场景,成为现代水上作业的重要工具。东莞小豚智能的无人船艇具备低噪音特性,避免对水下生物造成干扰,适合科研应用。上海多功能无人船艇修理
创智号”试验船由中国船舶七〇二所、深海技术科学太湖实验室,以及小豚智能等单位共同研制。上海多功能无人船艇修理
从成本角度来看,无人船艇具有明显的优势。传统有人驾驶船艇在运行过程中,需要配备专业船员,这涉及到人员工资、培训费用以及生活保障等一系列开支。而无人船艇无需考虑人员配备问题,有效降低了人力成本。同时,无人船艇的维护保养相对简单,由于没有复杂的人员生活设施,维护工作主要集中在船艇的机械和电子设备上,减少了维护项目和工作量,进而降低了维护成本。此外,无人船艇的能源消耗也相对较低,采用高效的动力系统和节能技术,在完成相同任务的情况下,能源费用比传统船艇节省不少。综合来看,无人船艇的低成本特性,使其在各类水域作业中更具经济竞争力。上海多功能无人船艇修理