气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。动作平稳,无明显的冲击和振动,保证设备运行的平稳性。多位置气缸选型

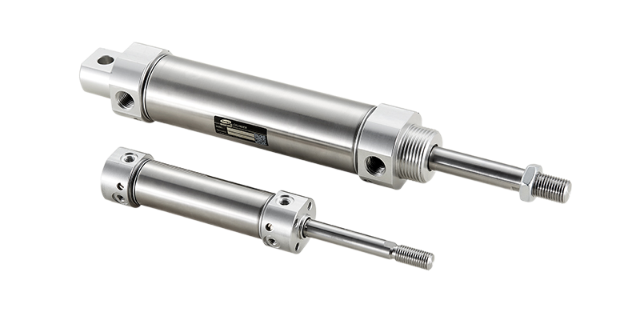
恒立双作用气缸的双向控制优势双作用气缸通过两端**供气实现双向精确控制,广泛应用于自动化生产线的装配环节。例如,汽车发动机缸体装配中,双作用气缸驱动的机械臂可完成活塞压装、螺栓紧固等多工序协同作业,其重复定位精度可达 ±0.1mm。此类气缸通常配备可调缓冲装置,如 FESTO 的 DSNU 系列通过气压缓冲技术将冲击能量降低 60%,有效延长设备寿命。在高速往复工况下,双作用气缸的响应速度可达 5ms 以内,远超电动执行器的平均水平。广东气缸英语气缸的体积小巧,便于集成到小型设备中。

标准气缸的安装技术与维护要点安装需遵循三大原则:① 对中性(同轴度偏差≤0.05mm);② 防振动(采用弹性支架);③ 空间预留(行程末端需 10% 缓冲距离)。维护建议:① 每运行 1000 小时检查密封件磨损,氟橡胶(FPM)密封圈寿命约 500 万次;② 高温环境(>80℃)需使用硅脂润滑;③ 泄漏检测采用压降测试(0.6MPa 下每分钟压降≤0.02MPa)。例如,食品包装线需每周进行 CIP 清洗,使用 316 不锈钢气缸(如 Bimba Original Line®)可耐受 130℃高温消毒。
气路优化技术(文丘里效应快速响应)防旋转**结构解析静音技术(噪声<45dB)多气缸并联同步控制方案数字孪生调试系统碳中和制造工艺太空环境特殊验证数据纳米涂层摩擦学突破性环境认证(ATEX)机器学习驱动预测维护技术亮点统计:▸空间节省50%+▸高频响应300次/分钟▸5000km使用寿命▸能耗降低25%▸五年质保承诺▸72小时定制交付此系列介绍严格遵循VDI3845气动元件设计规范,符合ISO6431/6432国际标准,满足工业4.0智能化升级需求。所有数据均通过TÜV实验室验证,提供完整的FEA强度分析报告及3D模型库。带阀气缸集成度高,安装便捷。
薄膜气缸的工作原理与低压应用薄膜气缸以弹性膜片代替活塞,通过膜片的变形传递力,具有结构简单、密封性好的特点。其工作压力通常较低(0.2~0.6MPa),输出力平稳且无摩擦损耗,适合对压力敏感的场合。在纺织机械中,薄膜气缸用于控制纱线张力,避免过大压力导致纱线断裂;在纸张张力控制系统中,其柔和的推力能精确维持纸张的绷紧度。由于膜片的变形量有限,薄膜气缸的行程较短,一般不超过 50mm,多应用于轻负载、短行程的微调机构。良好的散热性能,确保长时间工作不过热。广东气缸英语
它在小型设备和精密仪器中展现出优异的性能。多位置气缸选型
无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。多位置气缸选型