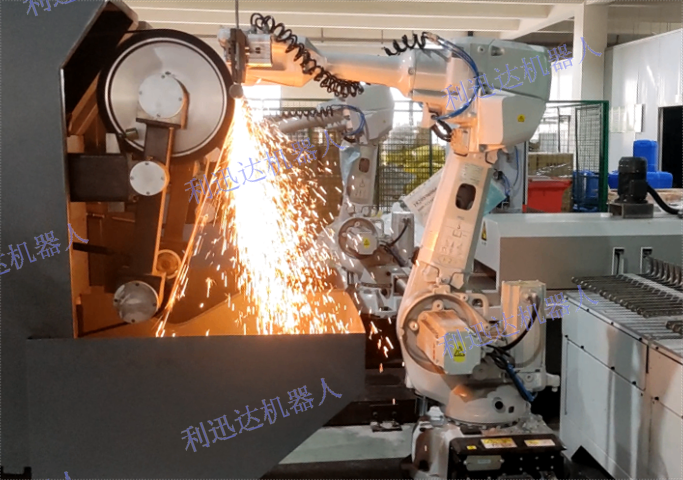
砂带机工作原理与性能参数砂带机作为设备的**加工单元,采用后驱动力传输设计,每个工位**配备4千瓦三相异步电机,通过高性能变频器实现精确的转速控制。电机输出轴经过精密减速机构后驱动主轴旋转,转速调节范围300-2500转/分钟,用户可根据工件材质、打磨阶段等工艺需求灵活设置比较好工作参数...
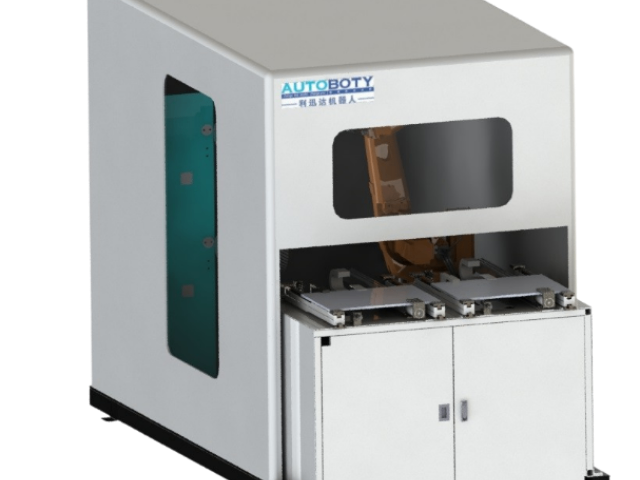
双工位砂带机打磨设备基本参数
- 品牌
- ABB,发那科,库卡,新时达
- 型号
- LXD-ABB2600-20-16-B-2A-2-2Q-D
- 电压
- 380
- 加工定制
- 是
- 外形尺寸
- 3300*1700*2300
- 用途
- 抛光打磨
- 产地
- 广东
- 厂家
- 广东利迅达机器人系统股份有限公司
双工位砂带机打磨设备企业商机
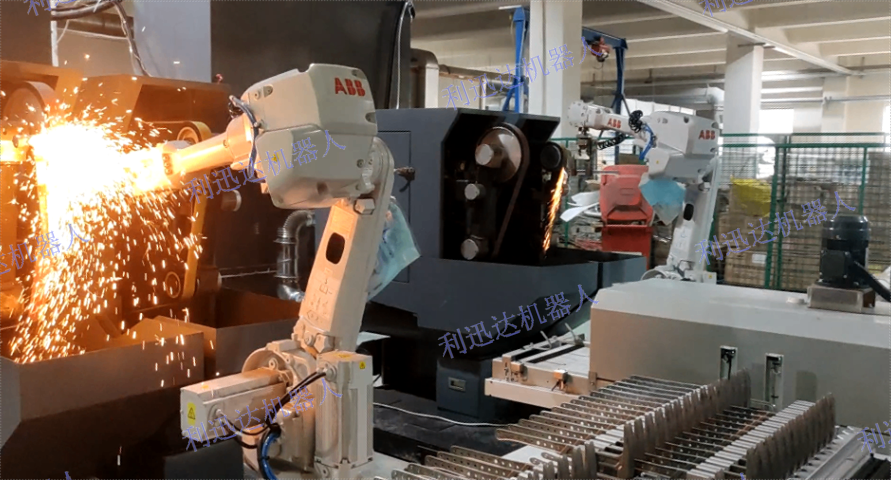
机器人系统的**技术特点ABBIRB2600机器人作为整个双工位打磨设备的**执行单元,其技术先进性和性能可靠性是设备高效运行的根本保障。这款机器人采用了优化的四关节设计,结构紧凑而坚固,其工作半径覆盖范围***,能够灵活地到达工作空间内的任何指定位置。机器人本体在关键部位采用了轻量化设计与高刚性材料相结合的策略,在确保其能够稳定承载20公斤负载的同时,实现了高速的运动响应,其比较大运动速度可以超过每秒2米,从而有效缩短了非加工时间,提升了生产节拍。机器人的控制系统集成了ABB独有的TrueMove™运动控制技术,这使得机器人在执行复杂的三维空间轨迹时,依然能够保持极高的路径跟踪精度,特别适合于处理具有复杂曲面轮廓的工件打磨任务,例如汽车覆盖件的模具、涡轮发动机叶片等。其腕部集成了高灵敏度的六维力/力矩传感器,能够实时监测打磨过程中砂带与工件之间的接触力,并将数据反馈给主控系统,从而实现动态的力控调整,确保设备在10-220牛的可调压力范围内,将控制精度稳定在。机器人的防护等级高达IP67,这意味着它能够完全防止粉尘侵入,并且可以承受短暂的水浸,因此能够很好地适应打磨车间常见的多粉尘、有一定湿度的恶劣工业环境。 采用ABB IRB2600机器人,负载达20公斤,适用于打磨任务。东莞自动化双工位砂带机打磨设备检修
工作环境与员工满意度的***改善效果该设备通过其自动化和封闭式的设计,对工作环境的改善效果是立竿见影且多方面的。全封闭的防护结构,配合高效的集中除尘接口,能够将打磨过程中产生的有害粉尘浓度控制在国家职业卫生标准规定的容许浓度以下,极大地保障了员工的呼吸系统健康。设备在设计和制造过程中充分考虑了噪声控制,通过采用低噪声电机、隔音材料、减振装置等措施,将工作区域的噪声水平稳定地控制在85分贝以下,符合职业健康的噪声暴露限值要求。自动化彻底消除了传统手工打磨给操作人员带来的重体力负荷和重复性机械劳动,有效减少了肌肉骨骼损伤、疲劳积累等职业病的发生风险。人机交互界面(HMI)设计直观、友好,逻辑清晰,**降低了操作人员的上手难度和学习曲线。工作环境的实质性改善,不仅直接体现了企业对员工健康的人文关怀,符合社会责任要求,也***提升了员工的工作满意度和对企业的归属感,这有助于降低关键岗位的人员流动率,保持生产团队的稳定性。许多用户反馈,在引进此类自动化设备后,员工满意度调查得分***提升,团队更加稳定,而这种稳定的、士气高昂的团队又反过来间接促进了生产质量的持续提高和企业文化的积极建设,形成良性循环。 东莞自动化双工位砂带机打磨设备检修砂带机力控范围10–220牛,控制精度高达0.5牛,打磨均匀稳定。

转速无级调节功能对工艺适应性的深度影响设备的转速调节系统采用了先进的矢量控制变频技术,实现了在300转/分钟到2500转/分钟范围内的平滑、无级调速。这种宽广且连续的转速调节能力,赋予了设备****的工艺适应性,使其能够从容应对各种复杂的加工场景。在粗磨或去毛刺阶段,通常需要设置较高的转速(例如在1500-2500转/分钟范围内),目的是为了获得比较大的材料去除率,快速消除工件的加工余量、焊接飞溅或锋利的毛刺。进入中磨阶段时,则适宜采用中等转速(例如在800-1500转/分钟范围内),此时需要在去除量、表面纹理质量和加工效率之间取得一个比较好的平衡。当进行精抛或镜面处理时,则需要设置较低的转速(例如在300-800转/分钟范围内),配合细粒度的砂带和合适的抛光辅料,以获得极高的表面光洁度和理想的光泽度。其所采用的变频控制系统保证了转速的稳定精度在±1%以内,这意味着即使在负载因工件形状不规则而发生变化时,电机也能通过自动转矩补偿来维持设定的转速恒定,从而保证了切削条件的稳定性。
砂带机的工作原理砂带机是双工位打磨设备的关键组成部分,每个工位配备一台4千瓦电机和变频器,驱动主轴旋转。电机通过变频器实现无级调速,转速范围300-2500转/分钟,用户可根据材料硬度或工艺要求灵活调整。例如,对于软质材料如铝材,可设置较低转速以避免过度打磨;对于硬质钢材,则提高转速以增***率。砂带长度,采用**度材料制成,耐磨且易于更换。在工作时,砂带通过电机带动高速旋转,与工件表面接触进行打磨。力控系统可调节压力在10-220牛之间,精度达,确保打磨均匀性。设备还支持自动送蜡机构,当用于抛光时,砂带机可瞬间转换功能,通过添加蜡剂提升表面光洁度。整体上,砂带机的工作原理基于机械传动和电子控制,结合机器人自动化,实现了高效、精确的打磨过程,适用于大批量生产环境。 利迅达公司提供从方案设计到安装调试的全流程服务。
仿形轮与平面板等**附件的应用场景为了满足对具有复杂几何形状工件的加工需求,该设备支持选配多种功能附件,其中仿形轮和平面板是相当有代表性的两种。仿形轮是专门为处理复杂曲面工件(如涡轮叶片、螺旋桨、异形模具等)而设计的。它的外轮廓可以根据特定工件的曲面形状进行精确的定制加工,从而确保在打磨过程中,砂带能够始终与工件的曲面保持比较大面积的均匀接触,避免出现“点接触”或“线接触”导致的局部过磨或欠磨问题。平面板则主要适用于大型平板类工件(如机床面板、不锈钢台面、建筑装饰板等)的表面处理,它为砂带提供了一个大面积、高刚性的稳定支撑平面,能够有效抑制打磨过程中可能产生的振动或抖动,从而防止在工件表面形成难以修复的波纹或颤振纹。这些**附件通常采用标准化的机械接口和电气接口设计,与主机之间的连接简便、可靠,更换过程快速,通常经验丰富的操作人员可在15分钟之内完成切换。附件一旦安装到位,设备的主控系统能够自动识别其身份,并调用与之相匹配的加工程序和工艺参数。 砂带张力自动调节,保持稳定切削状态与加工质量。青岛工业双工位砂带机打磨设备售后服务
可选配视觉定位系统,自动校正工件位置与姿态偏差。东莞自动化双工位砂带机打磨设备检修
定制化服务的深度与广度探索当设备的标准选型选项无法完全满足用户的特定生产需求时,利迅达提供的“订做”服务(代码D)便成为了关键的解决方案。这项服务的深度和广度远超常规,旨在为用户打造真正量身定制的自动化系统。定制化的内容可以涵盖多个层面:在**基础的机械层面,可以包括设计并制造用于夹持特殊形状工件(如异形曲面、柔性件)的**夹具;开发适用于非标准工具(如特种形状磨头、小型砂轮)的工具快换接口。在电气与控制层面,定制可能涉及与用户现有生产管理系统(MES/ERP)进行深度数据集成,开发特定的数据交换接口;或者增加特殊的传感器(如3D视觉定位系统、在线粗糙度检测仪)并将其无缝融入控制流程。在工艺层面,利迅达的工艺工程师团队可以与用户共同开发针对新材料(如复合材料、增材制造部件)或新工艺(如镜面电解抛光)的加工参数包,并进行充分的工艺试验与验证。整个定制流程通常始于详细的需求调研与技术澄清,随后进入方案设计与评审阶段,此阶段会产出包括三维布局图、电气原理图、控制逻辑说明在内的详细技术文档。在用户确认方案后,进入详细的机械设计、电气设计、软件编程阶段,随后是设备的制造、组装与厂内测试(FAT)。 东莞自动化双工位砂带机打磨设备检修
广东利迅达机器人系统股份有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同广东利迅达机器人系统股份供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
与双工位砂带机打磨设备相关的文章
山东一体化双工位砂带机打磨设备产品介绍
- 工业双工位砂带机打磨设备检查 2026-01-29
- 南宁双工位砂带机打磨设备销售厂家 2026-01-29
- 东莞工业双工位砂带机打磨设备服务 2026-01-29
- 钦州自动化双工位砂带机打磨设备维保 2026-01-29
- 济南双工位砂带机打磨设备供应商 2026-01-29
- 清远一体化双工位砂带机打磨设备检修 2026-01-29
- 肇庆自动化双工位砂带机打磨设备检查 2026-01-29
- 桂林双工位砂带机打磨设备客服电话 2026-01-28
- 桂林自动化双工位砂带机打磨设备设备价钱 2026-01-28
- 辽宁工业双工位砂带机打磨设备方案 2026-01-28
- 肇庆双工位砂带机打磨设备服务热线 2026-01-28
- 柳州自动化双工位砂带机打磨设备供应商 2026-01-27
与双工位砂带机打磨设备相关的产品



与双工位砂带机打磨设备相关的新闻
-
清远一体化双工位砂带机打磨设备系列 2026-01-27 16:10:34砂带规格选择与优化设备标准配置使用,这一规格经过精心设计,在工作效率与经济性之间取得比较好平衡。砂带采用多层复合结构,基材为**度聚酯纤维,表面涂覆不同粒度的磨料。根据加工需求,用户可选择从P60粗粒度到P1000细粒度的全系列砂带。粗粒度砂带(P60-P120)适用于快速去余量、去毛刺...
-
钦州通用双工位砂带机打磨设备维修 2026-01-26 21:21:00机器人系统的**技术特点ABBIRB2600机器人作为整个双工位打磨设备的**执行单元,其技术先进性和性能可靠性是设备高效运行的根本保障。这款机器人采用了优化的四关节设计,结构紧凑而坚固,其工作半径覆盖范围***,能够灵活地到达工作空间内的任何指定位置。机器人本体在关键部位采用了轻量化设...
-
广州双工位砂带机打磨设备检查 2026-01-26 22:12:29从打磨到抛光的功能无缝转换机制该设备的一个***优势在于其能够通过简单的参数调整和功能模块的启用,实现从材料去除型的打磨功能到表面光整型的抛光功能之间的无缝转换。这种多功能性极大地提升了设备的利用率和适用范围。在纯粹的“打磨模式”下,设备通常会以较高的主轴转速(如1500-2500转/分...
-
广西直销双工位砂带机打磨设备服务 2026-01-25 22:12:13砂带机的工作原理砂带机是双工位打磨设备的关键组成部分,每个工位配备一台4千瓦电机和变频器,驱动主轴旋转。电机通过变频器实现无级调速,转速范围300-2500转/分钟,用户可根据材料硬度或工艺要求灵活调整。例如,对于软质材料如铝材,可设置较低转速以避免过度打磨;对于硬质钢材,则提高转速以增...
与双工位砂带机打磨设备相关的问题
新闻资讯
产品推荐
-

肇庆定做全自动搬运与上下料机器人工作站生产厂家
2026-04-07 -
河北直销全自动打磨机器人工作站保养
2026-04-07 -
佛山定做全自动打磨机器人工作站设备价钱
2026-04-07 -

广西自动化全自动打磨机器人工作站生产厂家
2026-04-07 -

定做全自动搬运与上下料机器人工作站系列
2026-04-06 -

肇庆自动化全自动打磨机器人工作站设备价钱
2026-04-06 -

阳江工业全自动搬运与上下料机器人工作站售后服务
2026-04-06 -
青岛一体化全自动搬运与上下料机器人工作站
2026-04-06 -

南宁工业全自动搬运与上下料机器人工作站售后服务
2026-04-06