无人船艇技术为海底电缆检测与维护提供了创新解决方案。传统海底电缆巡检依赖大型工程船,成本高昂且效率低下。小豚智能开发的电缆维护无人艇集成高精度磁力仪和侧扫声呐,能够快速定位电缆位置并检测外部损伤。无人艇通过智能路径规划,可沿电缆路由自主巡航,实时传输检测数据至岸基控制中心。在台风等灾害天气后,无人艇能短时间出动评估电缆受损情况,大幅缩短抢修响应时间。这套系统已在多个海上风电场的电缆维护中得到应用,将巡检效率提升3倍以上,为海底基础设施维护提供了可靠的技术支持。小豚无人船喷水推进器船舶推进器,它的作用是将船舶动力装置提供的。安徽水文测量无人船艇技术参数
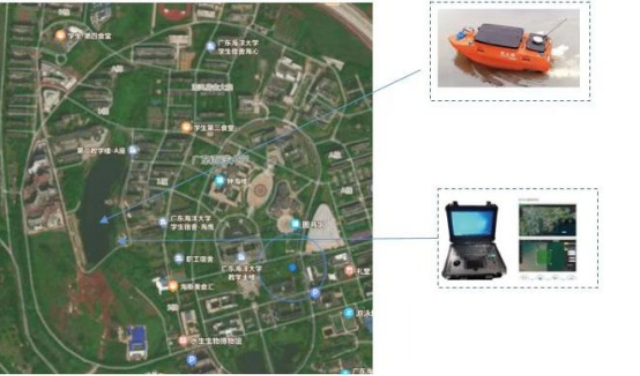
6月6日,小豚智能作为参研单位之一的深远海绿色智能技术试验船顺利完成海上航行试验与科研试验。此次试航共32家参研参建单位参与,开展了54个大项、总计512个分项的试验,对总体性能、动力电力系统、动力定位系统、通导系统、智能系统等进行了考核验证,各项指标达到设计要求,部分关键性能指标超过预期。试航中还对动态测试系统、融合平台等科研样机开展了海试验证,对智能中速机、导航雷达、智能操舵系统等20余套器件设备系统进行了动态测试,充分考核各器件设备系统在实际海况、实船应用工况下的功能、性能、效能及可靠性。此船是“船舶与海洋工程装备实海验证中试平台”的重要重大装备,入级中国船级社。全船采用模块化加换装设计,具有高度智能化、接口可扩展性强、空间冗余度高、功能用途等特点。交付后将主要用于执行绿色智能技术中试验证、深远海装备水面支持保障和海洋科学综合调查服务等任务。浙江遥控无人船艇修理小豚智能利用混合式通讯和智能化控制等技术手段,构建船舶数据流动的基础架构。

自主导航是无人船艇的主要功能之一,其依赖SLAM(同步定位与地图构建)技术实现未知水域的实时建模。通过融合GPS、惯性导航和视觉里程计数据,船艇可精确计算自身位置并动态修正轨迹。避障系统采用分层决策机制:初级避障通过规则算法(如国际海上避碰规则COLREGS)处理静态障碍;高级避障则引入机器学习模型,预测其他船舶的运动意图并生成协同路径。例如,在繁忙航道中,无人船艇可通过AIS信号识别周边船只的航向与速度,自动保持安全距离。部分先进型号还具备抗风浪能力,采用闭环控制系统调节艇身姿态,确保在4级海况下稳定航行。这些能力明显提升了无人船艇在复杂环境下的可靠性与适应性。
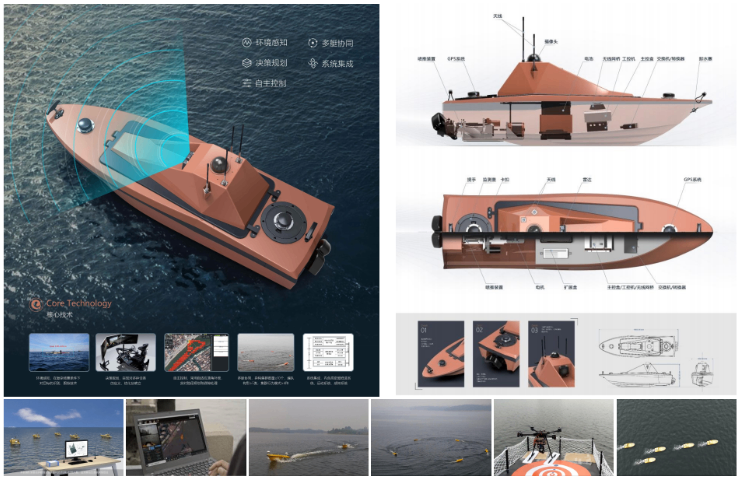
东莞小豚智能技术有限公司旗下的无人船艇,拥有丰富且实用的功能。它集成了先进的传感器系统,能够精细地感知周围的环境信息,如水质参数、水文数据等。在水面航行时,无人船艇可利用自身搭载的高清摄像头,对水域进行多方位的监控,为相关部门提供实时的图像资料。同时,其具备强大的数据传输能力,能将采集到的各类数据迅速且稳定地传输到控制中心,方便操作人员及时分析和处理。凭借这些功能,无人船艇可以高效地完成各种复杂任务,无论是日常的水域巡查,还是特殊情况下的应急监测,它都能发挥重要作用,成为水域监测与管理的得力助手。小豚智能的“智能船舶辅助驾驶系统CYBERPILOT”包括执行层、控制层、规划层、感知层、人机交互系统等。

无人船艇正成为水利工程安全监测的重要工具。针对水库大坝、堤防等水利设施,小豚智能研发的监测无人艇搭载多波束测深仪和结构扫描仪,可对水下结构进行毫米级精度的变形监测。无人艇通过定期巡航,建立水利设施的三维数字模型,通过对比分析及时发现裂缝、渗漏等隐患。在汛期,无人艇可24小时监测水位变化和流速数据,为防洪决策提供实时依据。相比人工测量方式,无人艇监测具有数据连续、响应快速、覆盖多面等优势,目前已在长江、珠江等多个重点水利工程中推广应用,成为保障水利设施安全运行的新利器。无人船艇配备夜间作业设备,如红外摄像头,确保在低光照条件下正常执行任务。山西喷水推进器无人船艇服务
小豚智能致力于研发无人系统共性技术。安徽水文测量无人船艇技术参数
无人船艇在水上救援场景中发挥着重要作用,小豚智能喷水推进器为其救援效率和安全性提供了有力支撑。当接到落水人员救援任务时,搭载该推进器的无人船艇能够以极快的速度驶向目标区域。在靠近落水者的过程中,喷水推进器可实现精细操控,避免因船艇惯性过大而对落水者造成二次伤害。此外,推进器与无人船艇上的智能识别系统协同工作,能够根据落水者的位置和状态,自动调整船艇的停靠位置和姿态,方便落水者攀爬或等待救援人员施救,显著提高了水上救援的成功率。安徽水文测量无人船艇技术参数