特殊功能气缸气液阻尼缸:气压驱动 + 液压阻尼调速,运动平稳(无冲击),速度可调(0.5~500mm/s),适合精密送料、压力装配(如轴承压装)。冲击气缸:通过瞬间释放高压气体产生高速冲击(速度可达 10m/s 以上),冲击力大,用于冲压、打孔、破碎(如小型金属件冲孔)。夹紧气缸:活塞杆端部带夹紧爪(如杠杆式、肘节式),快速夹紧工件,自锁性好(断电 / 断气不松夹),用于机床夹具、焊接定位。真空气缸:活塞杆端部集成真空吸盘,兼顾气动驱动与真空吸附,用于轻薄物料(如纸张、薄膜)的搬运。三、按安装方式分类固定式:通过法兰(前端 / 后端法兰)、脚座(轴向 / 径向脚座)固定在设备上,适合负载方向与活塞杆轴线一致的场景(如水平推料)。摆动式:通过耳环(单耳环 / 双耳环)、轴销安装,允许气缸随负载轻微摆动(±5°),抵消安装偏差,适合倾斜推料、翻转机构。嵌入式:缸体嵌入设备凹槽内,节省空间,用于小型自动化设备(如电子元件装配机)。拉杆气缸结构坚固,能承受较大的负载和冲击力。超薄气缸新报价

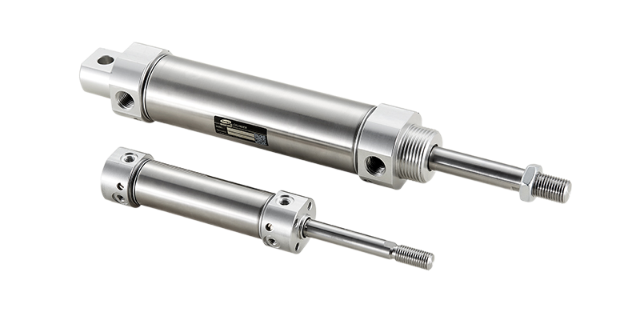
标准气缸的**结构与工作原理标准气缸由缸筒、活塞、活塞杆、端盖及密封件组成,通过压缩空气驱动活塞实现直线往复运动。其**设计包括:① 阳极氧化铝合金缸筒,表面粗糙度 Ra≤0.8μm 以确保活塞顺滑运行;② 组合密封圈(如 FPM+TPE-U)实现双向密封,耐压可达 1.2MPa;③ 可调缓冲机构(如 Festo DNC 系列)通过弹性缓冲环吸收 90% 冲击能量。工作原理上,双作用气缸通过交替供气实现双向运动,单作用气缸则依赖弹簧复位,适用于单向推力需求场景。宽型气缸生产过程拉杆气缸的安装和拆卸简单快捷。 对润滑要求不高,减少维护工作。

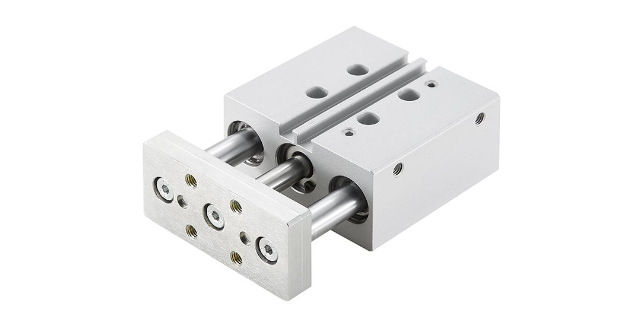
气动元件中的无杆气缸应用很广无杆气缸的结构特点与应用场景无杆气缸通过活塞与滑块的磁耦合或机械连接实现直线运动,取消了传统活塞杆,因此具有结构紧凑、行程长的优势。磁耦合无杆气缸利用强磁力传递动力,运动平稳但负载能力有限;机械接触式无杆气缸则通过导轨滑块传递力,负载更大但存在一定摩擦损耗。在自动化焊接流水线中,无杆气缸可带动焊枪完成长距离连续作业;在包装机械的薄膜牵引机构中,其无突出部件的设计能有效避免物料缠绕。
双作用气缸的结构优势与行业适配双作用气缸通过活塞两侧交替供气实现往复运动,无复位弹簧,因此输出力均衡且行程可灵活设计。其缸筒内壁通常采用精密珩磨工艺,配合耐磨密封圈,确保长期高频运动下的密封性。在汽车焊接生产线中,双作用气缸凭借稳定的推力输出,精细控制焊枪的定位与压力;而在印刷机械上,其快速换向能力可匹配纸张传送的高频节奏。相较于单作用气缸,双作用气缸的能耗略高,但在大负载、长行程工况下更具实用性。可以在高湿度环境中正常运行。
气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。调整气缸位置以适应工作需求。浙江星辰气缸
薄型气缸以其紧凑的设计,极大地节省了安装空间。超薄气缸新报价
气缸与 PLC 的控制逻辑设计气缸的自动化控制通常通过 PLC 编程实现,基本控制逻辑包括单缸往复、多缸联动等。单缸往复控制通过电磁阀的通断切换实现气缸的伸出与缩回,配合限位开关实现自动循环;多缸联动则需要设计时序逻辑,确保各气缸动作协调,如装配线上的 “抓取 - 移动 - 放置” 流程。在复杂工况下,可采用步进控制方式,将整个运动过程分解为若干步序,每步序完成后反馈信号至 PLC,再执行下一步动作。控制程序设计时需包含故障诊断模块,当气缸动作超时或传感器异常时,能及时触发报警并停止运行。超薄气缸新报价