致使后期频繁采取水质改良举措,增加水产养殖的运营成本。此外,水域生物量统计传感器虽已研发多年,但多应用在捕鱼船或生物科研船中,在水产养殖无人船领域鲜有应用,更未与无人船上的饲料投喂设施相配合使用过,致使如何采用无人船针对水域内的生物数量精确投喂饲料的相关技术研发目前仍处于一片空白。因此,针对上述问题提供一种小豚智能水产养殖无人船成为一种必需。无人船,现有的水产养殖无人船较为原始,一般为遥控式作业,*能起到初步替代养殖工人执行下水投喂作业的作用,所采用的饲料投喂方式通常较为简单粗暴,投放位置及投放量均缺乏针对性。具体表现在:饲料投放通常以平铺为主,没有根据局部生物密度合理投放,亦未考虑非适量投放是否会对养殖水域内的水质造成不良影响。现有技术中部分水产养殖无人船上虽搭载的水质传感器,但水质传感器的设置位置一般位于船体后端或直接设置在船体末端,所采取的作业模式通常为沿行进方向投料并采集水质数据,在上述作业流程下,被采集的水质数据易受投放饲料影响,难以准确反应当前水域环境的真实情况,总经理耿涛带领公司各部门负责人共同参加了这个新里程碑的重要仪式。重庆附近海洋牧场无人船

近期,2020年松山湖创新创业大赛掀起一阵“双创”热潮,吸引全国各地近千个创新项目踊跃参与。东莞小豚智能技术有限公司(下称“小豚智能”)过关斩将,凭借“全自主无人艇关键技术及装备”项目荣获总决赛特等奖。事实上,小豚智能是5年前,由广东华中科技大学工业技术研究院(下称“工研院”)引进松山湖的创新创业团队。期间,从产品研发、技术转化、实验室建设到产业化发展,工研院为其提供了全链条的产业孵化服务。如今,工研院、广东省智能机器人研究院(下称“广智院”)院长张国军鼓励小豚智能走出工研院,入驻松山湖国际创新创业社区。他认为:“我们不仅要培育‘苹果树’,还要打造‘苹果园’,源源不断向园区输送企业。”常见海洋牧场无人船平台船舶智能化改造助力全球无人(船)智能技术,让人类生活更美好!
11月22日,GUSC2023无人系统大会在广东珠海启幕,大会由中国航空学会、珠海市人民单位联合主办,是集“会、展、赛、战”等多元形式,以国际性、专业性、无人系统技术创新为主要特征的科技盛会。大会举办了“无人战法一第二届全国无人系统实景应用演练“无人系统之夜”等系列活动。小豚智能作为水面无人驾驶一站式解决方案提供商,亮相本届大会,参与了大会举办的“无人战法一全国无人系统实景应用演练“无人系统灯光秀”等活动,展示了自主研发的水域巡逻无人船、水上移动展示无人船等产品为水域巡逻、安防执勤、文旅演艺等行业应用提供了一站式解决方案,并在“无人系统之夜”中获第四届无人系统行业金翼奖。
而且现有自动投料机采用遥控操作和雷达测距自动航行,实现真正意义上的自动航行投料,需要遥控操作投料机来在无人船自动航行时进行投料,确定无人船的航线,仍需要人工操作控制无人船来进行投料。而且现有的自动投料船全部属于“盲投”,不掌握生物在池塘的空间分布密度,无法实现按照生物的空间分布规划航线和精细化投料,做到有目的有规划的投放。无人船小豚智能水产养殖无人船水产养殖中,病害不可避免,需要通过药物及时除去,保证水产养殖动物正常生存。对于池塘养殖方式一般是人围着岸边随机向水里投放药片,网箱养殖方式一般是人工喷洒药物。在无人艇上安装喷洒装置,可以通过远程无人操作的方式控制药物的喷洒。在精养方式下使用无人艇投放药物治理疾病可以降低养殖人员的劳动强度,同时可以保证药物在养殖区域分布均匀,确保药物喷洒覆盖整个养殖区域,从而增加了药物的使用效果。小豚智能新车间预计2022年9月正式投入使用,将建设成为公司更加完整高效的无人艇研发生产场地。
正是因为团队中有很多像耿涛一样的党员,在科研岗位上积极发扬着“钉钉子精神”,他们的无人自主技术部分成果已达到国际水平。他们不仅开发了无轴推进器小豚-56s、无人艇平台系列江豚-12c,打造了江豚、河豚、海豚等多系列产品线和品牌,研发生产的小豚智测和小豚智教应用解决方案等系列产品在教育、环保、船舶、测绘、应急等领域得到广泛应用,真正实现了用科技“反哺”教育。其中全自主无人船多艇协同、机艇协同成果,曾被央视新闻等媒体报道。无人船艇从学术到技术,从技术到产品,都是有差距的。耿涛和团队在将课本上深奥、先进的理论知识应用到实际工程的过程中遇到不少困难。为了提升无人艇航线控制器精度,让其水迹呈直线走动,耿涛积极发挥党员的示范作用,带领团队通过大量的理论研究和实操,成功将先进控制理论技术应用到无人船,解决了大量的工程问题。产品从设计、装配、测试到应用,每一步都凝结了耿涛及同事们集体智慧的结晶。海洋牧场无人船小豚无人船喷水推进器喷管方向可变,便于船舶操纵。云南集成海洋牧场无人船
小豚智能亮相GUSC2023无人系统大会。重庆附近海洋牧场无人船
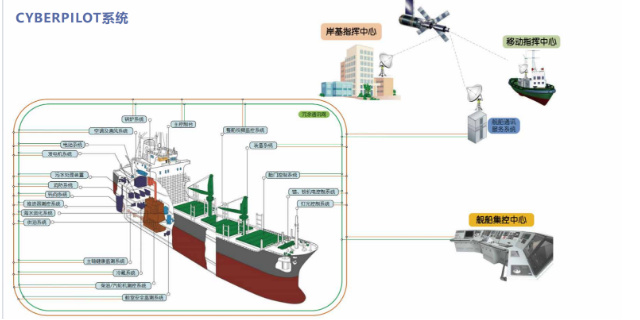
小豚智能水产养殖无人船系统,搭载定位器,传感器,图像采集装置,采样与投放装置,结合4G通信,云计算等技术,完成巡航和避障,水质检测,水面异物检测,远程控制水样采集和物料投放等任务,设计客户端软件显示无人船路线,水质检测实时数据和水面图像,通过云端保存数据.以基于**近邻策略的改进禁忌搜索算法和Mask R-CNN网络为**实现无人船的路径规划和自主巡航,提高航行效率和精度.实验结果表明,该无人船能精细航行,对养殖环境进行实时监控,有效地收集并保存数据,为生产和科研提供了有价值的信息。实现水产养殖区域环境(包括水温、溶解氧、PH等)数据实时自动监测,通过格物云DTU传输至GiveLink云平台,进行数据分析;实现水产养殖区域环境(包括水温、溶解氧、PH等)的集中、远程、联动控制;实现对水产养殖区域各类信息的存储、分析和管理;提供阈值设置功能;具备智能分析、告警功能。水产养殖无线监控系统通过对鱼塘的环境以及现场设备的集中监控,使得水产养殖实现智能化,随时随地掌控鱼塘的实时情况。重庆附近海洋牧场无人船