视觉点胶系统可以具备智能调度能力,尤其是能够结合人工智能和机器学习技术的系统。这种系统可以通过学习和优化算法,根据实时的工作环境和任务需求进行智能调度和决策。智能调度能力可以使视觉点胶系统更加灵活和适应性强,如根据优化算法自动调整点胶路径,提高胶水的分发效率和质量,并在不同的点胶任务间实现快速切换。此外,智能调度能力还可以包括识别和处理异常情况的能力。当出现胶水点胶错误、工件位置偏差、光照条件变化或其他干扰因素时,系统可以快速地做出调整和应对。通过自适应的算法和实时反馈机制,系统可以减少工艺缺陷和生产事故的发生,提高工作稳定性和安全性。在电子制造领域,视觉点胶系统能够准确应用胶水,保证产品质量。惠州视觉点胶机系统服务商
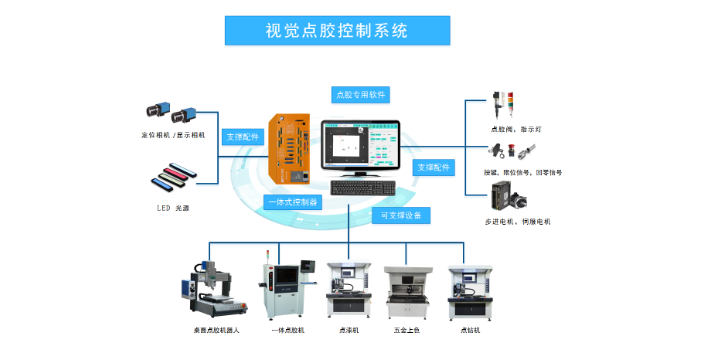
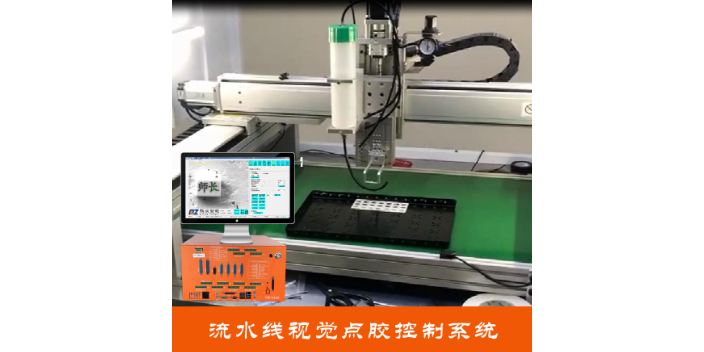
视觉点胶系统是一种高度自动化的设备。通过结合视觉技术和点胶技术,系统能够实时获取工作环境中的图像信息并进行分析和识别,从而自动确定点胶的位置和路径。操作人员只需设置好相关参数,系统就能够自动完成胶水点胶工作。视觉点胶系统的自动化程度主要体现在以下几个方面:图像处理和分析:系统利用摄像头或激光传感器获取图像信息,并利用高效的图像处理软件进行分析和识别。系统能够实时检测工件表面的形状、大小和位置等特征,从而帮助确定点胶的位置和路径。自动定位和路径规划:系统能够根据图像信息和设定的参数,自动确定较好的点胶位置和路径。它可以识别工件的特征,计算出胶水点胶的准确位置,并规划出较好的路径,以确保点胶的精度和效率。自动胶水供给和控制:视觉点胶系统通常与胶水供给系统和控制系统相连,可以自动控制胶水的供给量和流动速度,以确保胶水的稳定性和一致性。这样可以避免人为因素对点胶过程的干扰,并提高生产效率和精度。广州全自动视觉点胶系统费自动化的胶水点胶流程减少了人为操作带来的变数,提高了产品稳定性。

视觉点胶系统是一种基于机器视觉技术实现的高精度、高效率的点胶方法,其应用范围普遍,包括电子、汽车、机械制造、医疗器械等领域。未来视觉点胶系统的发展方向和趋势主要体现在以下几个方面:更高的精度和更高的速度:随着制造业对产品精度和生产效率的日益要求,视觉点胶系统需要实现更高的精度和更高的速度。为此,需要不断改进算法、硬件和控制系统,以提高系统的响应速度、精度和稳定性。更智能的功能和更强的适应性:未来的视觉点胶系统需要具备更智能化的功能和更强的适应性,可以自动识别和适应不同的工作环境、工件和工艺要求。此外,还需要通过机器学习、深度学习等技术实现自主学习和优化。更加人性化的界面和交互方式:视觉点胶系统需要更加人性化的界面和交互方式,使操作更加简单、直观和易于掌握。此外,需要提供更加细致和多方面的报告和分析,帮助管理人员进行决策和优化。
旗众视觉点胶系统了解一下吗?通过我们的软件,您可以轻松绘制点胶路径,包括直线、圆弧和复杂曲线。只需点击几下,系统就会自动计算比较好点胶路径,确保准确性和效率。我们的软件还具备先进的图像识别功能。它能够准确检测工件的位置和形状,并根据预设的参数进行自动点胶。无论是电子制造、汽车工业还是医疗器械,我们的软件都能帮助您提升生产效率,减少人力成本,同时保证优良品质的点胶工作。视觉点胶系统—定时排胶功能:定时排胶功能就是在长时间等待后会到指定位置进行排胶,防止胶水固化。此功能用于在使用ab胶,常温固化胶水时,防止停止加工后等待过长导致胶水固化,会到指定位置进行排胶。该功能有效解决因工人换班或休息,长时间没人操作而造成胶水固化的难题。 视觉点胶系统可以根据不同产品需求进行智能调整,适应性强。
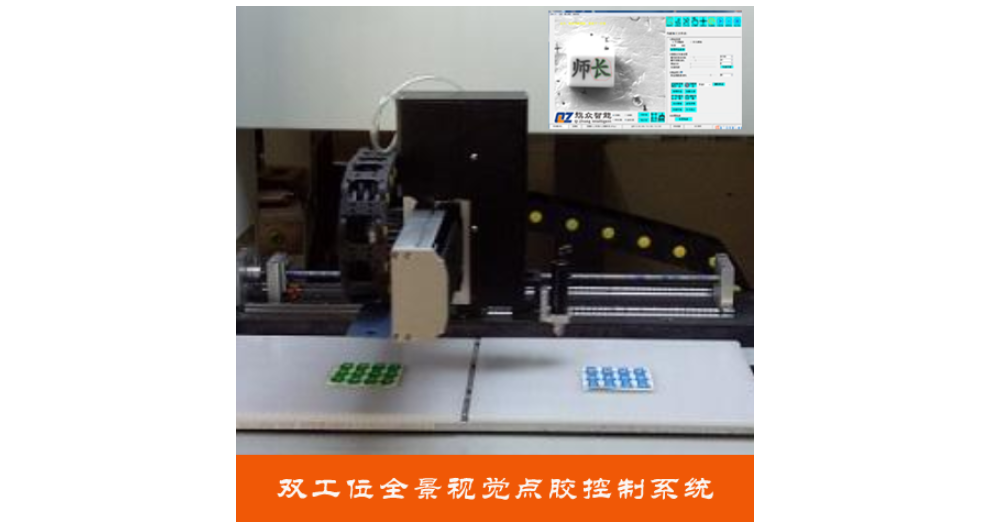
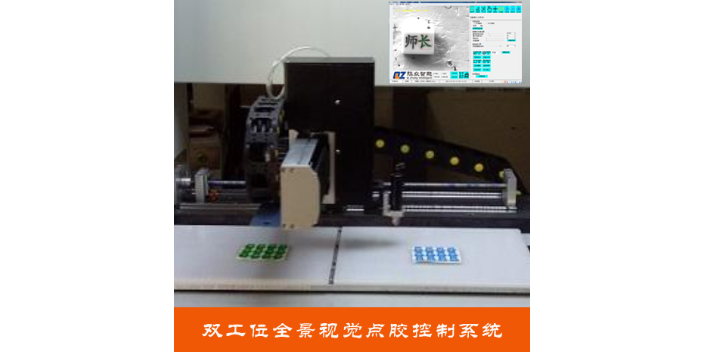
全景+局部视觉点胶系统旗众智能全景+局部视觉点胶系统,这款点胶系统在整个行业真可谓是相当炸裂的存在这套点胶系统结合了全景视觉技术和局部视觉技术,实现了全局和局部双重定位,从而提高了点胶的精度和效率。全景视觉技术能够在大范围内识别点胶位置和形状,而局部视觉技术则可以在局部区域内实现更高精度的定位和点胶。全景+局部双重定位视觉点胶系统通过对两种视觉技术的融合应用,能够实现对各种复杂形状、高难度的点胶应用的高精度、高速度、高稳定性的点胶。目前,这套点胶系统已经广泛应用于多个行业中。 全景视觉系统的无夹具特点使得视觉点胶系统更加灵活适用于不同工件。佛山自动跟随视觉点胶系统公司电话
通过视觉点胶系统,企业可以实现准确的胶水涂覆,确保产品质量。惠州视觉点胶机系统服务商
视觉点胶系统在使用之前需要进行定位校准,主要包括机械位置校准和视觉位置校准。机械位置校准:保证点胶准确度的前提是要先保证机械结构的准确度,因此需要进行机械位置校准。首先需要通过手动控制机械臂将各关节移动到规定位置,如机械臂的零位、水平位、垂直位等。这些位置需要与机床坐标系建立对应关系。然后需要通过机器人控制系统中的机械补偿功能,对机械臂在各关节的误差进行补偿,保证其运动的精度和准确度。视觉位置校准:首先需要安装并调试好相机、光源等视觉系统硬件设备。然后需要准备标定板,标定板上通常会有一系列已知大小的标记,可以通过标记在图片中的位置来计算相机内外参数,建立相机坐标系和机床坐标系之间的转换关系。进行视觉位置校准时,需要通过点胶笔尖和相机之间的坐标变换,将视觉坐标系中的点转换到机床坐标系中。惠州视觉点胶机系统服务商