
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
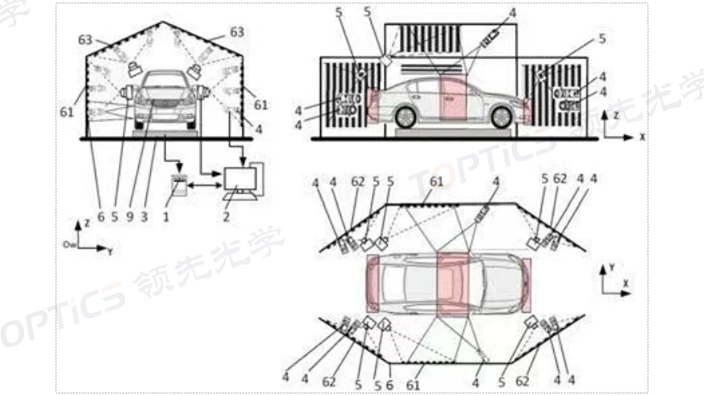
一种车身漆面缺陷检测装置,其特征在于:包括伺服控制器、工控机、车身输送机构、若干面阵相机、若干投影仪和若干投影屏幕,所述工控机与所述伺服控制器联接,所述伺服控制器与所述车身输送机构联接,所述车身输送机构可在所述伺服控制器和工控机的作用下驱动待检测车辆在长度方向和高度方向移动,所述工控机与所述投影仪联接,所述投影屏幕设置在所述投影仪外且与所述投影仪对应,所述面阵相机分布在待检测车辆四周。2.根据权利要求1所述的车身漆面缺陷检测装置,其特征在于:所述投影仪共有8台,其中,2台设置在待检测车辆车头位置,2台设置在待检测车辆车尾位置,4台设置在待检测车辆车身侧面位置和车顶位置,所述投影屏幕包括2个平行于xoz平面、且平行于待检测车辆车身设置的平行竖直屏幕、4个竖直且与xoz平面呈40。 汽车漆面表面外观缺陷全自动检测系统及方法将极大的提升汽车外观质量及外观质量的检测效率。江苏高精度汽车面漆检测设备推荐厂家
汽车面漆检测设备
将39个工业视觉传感器固定于车身周围,进行涂装表面图像获取,保证每个传感器都能固定获取并检测对应的区域范围,并通过所有传感器的合理分布,使得检测的总区域将车身表面全覆盖。系统以LED红色高亮光带为光源,在车身行进的同时,对车身涂膜表面进行高清扫描,从每辆车上可以获取3万张以上的高清图像,而后通过高性能计算机处理中心对图像数据进行处理,进而根据算法分析出接测结果,并通过数据输出,自动指出其缺陷位置。该技术对于车身涂装缺陷的检测与识别主要依靠缺陷表面与正常涂装表面的反射光差异,在光的反射定律下,车身涂装平面形成的反射光具有典型特征,当视觉传感器接收到与预设光线不同的信号时,就可以大概判断其存在缺陷问题,而后将传感器图像进行智能处理,进而分析得出结果。汽车涂装自动检测技术的系统结构主要包括编码器、视觉传感器、通讯I/O模块、光电开关传感器、PLC、光源、处理器等。该系统结构具有占地面积小,应用灵活的特征。主检测系统占地×,后盖检测结构占地×,可以灵活安装在面漆存储线内,进而在车间改动时较为简单。在具体的系统结构中,系统编码器直接连接输送滚床,检测系统根据输送转速控制拍照的频率。河北工业质检汽车面漆检测设备价格在走停线和随行线中均可检测,便于改造现有产线。

相位偏折术是一个比较冷门的方向,主要用于测量镜面物体。一直以来,干涉法都是测量镜面比较好方法,精度可以达到波长的几百分之一,但是有一些局限性:测量自由面型的镜面物体时,干涉法所需要的光学补偿原件制作复杂且昂贵;回程误差,干涉法很难快速标定;测量环境苛刻,不适合干涉法测量,因为轻微抖动、温度变化,会给测量记过带来很大误差;相位偏折法是一种应用于镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。
该模型将每个标签学习定义为二进制任务,以应对多标签学习问题。,然后使用VGG网络来训练和识别缺陷位置。还有的研究者提出了一种帧间注意策略和帧间深度卷积神经网络来检测输入的X射线图像中的缺陷,从而有效地提高了检测精度。还有的研究者提出了一种基于YOLOV2的色织疵点自动定位与分类方法。在收集了276个色织的织物缺陷图像并进行预处理之后,使用YOLO9000,YOLO-VOC和TinyYOLO构建了织物缺陷检测模型。,然后将不平坦的表面划分为潜在的缺陷区域,并使用神经网络对缺陷区域进行识别和分类。。与原来的SSD算法相比,精度有效提高。,并将CNN与mobilenetSSD结合在一起,有效地实现了对容器密封表面上的裂缝,凹痕,边缘和划痕的实时,准确检测。尽管深度学习方法在目标检测中表现出色,但它并不是特定领域的综合内容。到目前为止,关于汽车车身漆膜缺陷检测的研究还很少。本文提出了一种改进的MobileNet-SSD的车身涂料缺陷检测算法。首先,提出了一种数据增强方法来扩展在生产车间中收集的车身漆膜缺陷图像,并改进了传统SSD算法的网络结构和匹配策略。以MobileNet代替vgg16作为SSD的基本网络,实现了汽车车身漆膜缺陷的自动检测,有效提高了检测速度和准确性。适用于各类电子元件的漆面缺陷检测,外观检测,品种辨别,3D图像处理.多种检测与定位功能,大幅提高工作效率。

实现车身漆面缺陷自动检测系统非常重要。缺陷检测一直是计算机视觉领域的研究热点。通过计算机视觉知识的使用,可以有效、准确地实现缺陷区域的检测和分类。目前,计算机视觉在车身漆膜缺陷检测方面有很多成熟的研究。,选择了感兴趣的区域,并标记了它们,以实现缺陷位置的准确检测。还有的研究者使用局部二值模式(LBP)和局部方差(VAR)算子的旋转不变性度量的联合分布来检测和定位人**绘中的缺陷。,然后根据局部方向模糊方法检测整个照明区域的缺陷。。选择多个几何特征和灰度特征作为缺陷特征参数,用于SVM分类和识别。通过深度学习方法对输入图像集进行训练,并且可以使用检测模型来检测缺陷图像。在缺陷检测中,深度学习也有很大的贡献。吴松林等人提出了一种基于Siam网络的按钮缺陷相似度检测方法。利用专门设计的损失函数Siam网络,实现了自动样本提取和相似度测量,并将其应用于实际的机器视觉系统。HuijunHuet等人结合缺陷目标图像提取三种图像特征:几何特征,灰度特征和形状特征,并使用支持向量机对钢带的表面缺陷进行分类。(TDDnetwork),它利用深度卷积网络固有的多尺度金字塔结构来构造特征金字塔,以提高PCB缺陷检测性能。。随着工业4.0时代的到来,这一趋势不可逆转。太原代替人工汽车面漆检测设备哪家好
通过客观一致的检查,实现100%的缺陷检测、分类和分析,从而得出关于缺陷原因的结论。江苏高精度汽车面漆检测设备推荐厂家
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不仅可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。 江苏高精度汽车面漆检测设备推荐厂家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
所述齿轮腔内的所述第三转轴外表面固定设置有与所述diyi齿轮啮合的第二齿轮,所述第三转轴顶部末端伸入所述转动腔顶壁内开口向下设置的凹槽内,所述凹槽内的所述第三转轴末端固定设置有与所述凹槽端壁上固定设置的内齿圈啮合的第三齿轮。进一步地,所述联动装置包括所述机身顶壁内设置的转动腔,前后两个所述diyi转轴均贯穿所述转动腔且所述转动腔内的所述diyi转轴外表面固定设置有限位块,所述转动腔内可转动的设置有与前后两个所述蜗轮均啮合的蜗杆,所述转动腔顶壁内可转动的设置有与所述手动轮固定连接的第四转轴。光泽度计是一种专业用于测量物体表面光泽度的仪器,尤其适用于汽车面漆的检测。上海光学方法汽车面漆检测设备哪家...
- 郑州全自动汽车面漆检测设备推荐 2025-11-20
- 黄石全自动汽车面漆检测设备 2025-11-20
- 丹东汽车面漆检测设备质量好价格忧的厂家 2025-11-20
- 吉林光学方法汽车面漆检测设备品牌 2025-11-20
- 郑州全自动汽车面漆检测设备供应商家 2025-11-20
- 丹东快速汽车面漆检测设备 2025-11-19
- 郑州偏折光学法汽车面漆检测设备质量好价格忧的厂家 2025-11-19
- 本溪非隧道式汽车面漆检测设备哪家好 2025-11-19
- 河北代替人工汽车面漆检测设备推荐 2025-11-19
- 武汉汽车面漆检测设备供应商家 2025-11-19




- 福州快速汽车面漆检测设备哪家好 2025-11-18
- 合肥光学方法汽车面漆检测设备生产厂家 2025-11-18
- 鞍山高精度汽车面漆检测设备供应商 2025-11-18
- 郑州高精度汽车面漆检测设备供应商家 2025-11-18
- 上海光学方法汽车面漆检测设备价格 2025-11-18
- 包头汽车面漆检测设备品牌 2025-11-17






- 温州微纳检测设备联系人 02-26
- 深圳玻璃面型检测品牌 02-26
- 曲度检测设备咨询 02-26
- 常州不规则玻璃面型检测电话 02-26
- 马鞍山平坦度检测设备联系方式 02-26
- 上海硅片抛光面检测设备公司 02-26
- 绍兴检测设备生产厂家 02-26
- 南京异形玻璃面型检测联系人 02-26
- 芜湖翘曲度检测设备公司 02-26
- 宁波硅片抛光面检测设备哪家好 02-26