点胶软件使用视觉点胶软件有哪些好处呢? 1、视觉点胶软件支持流水线、单、双工位多头点胶,拥有高精度、高产能、低成本、操作简单等众多优势,非常受众多客户的青睐。 2、视觉点胶软件采用全景大幅面视觉对位软件及高精度视觉定位软件自动识别,无需治具,可直接进行点胶,支持加工轨迹更加复杂的工件,精度更高; 3、可自动识别不良品或不需要点胶的产品,节约企业生产成本; 4、自动化左右两边工作台设计,可实现一边上料,一边不间断点胶作业,大幅度提高生产效率; 5、可以多头同时进行作业,支持多种工件产品同时加工,成倍提高生产效率,提高质量度。 6、胶量的大小粗细、涂胶速度、点胶时间、停皆时间完全可以根据参数去设定点胶工艺,精确控制出胶量、不漏滴胶。带视觉检测装置的点胶软件。北京桌面点胶软件控制系统
点胶机设备要完成平滑和精细的出胶作业,就需要软硬件之间的完美配合。旗众智能拥有自有为主算法和运动控制技术,为设备商提供“视觉运控一体化”为主控制模块,通过软硬件的整合,实现控制器和电机马达的完美配合,实现高速度、高精密、高准确度的点胶工作。我们采用全景视觉高精度定位系统及专业点胶软件,能够精确的定位拾取工件的位置和待放工件点胶的位置,自动快速识别工件,自动路径生成,实时动态显示加工轨迹,以实现更高速,更高精度的点胶作业,保证产品点胶质量。深圳双工位视觉点胶软件有哪些厂商CCD视觉点胶软件软件采用360度自动识别软件,该软件识别能力强,快速识别。

针对点胶机设备由于经常会出现拉丝、拖尾、胶点大小不连续、拐角堆胶等行业痛点问题,我司做了不同的视觉点胶解决方案。在视觉点胶软件上增加多个点胶功能工艺处理,用户可通过使用软件操作来解决:1、拉丝拖尾:通过设定参数,提前开关胶、延时开关胶,有效解决了结束段堆胶和拉丝。2、粗细不匀:通过速度前瞻算法,连续轨迹运动控制,使点胶过程平稳匀速出胶,避免不匀。3、拐角堆胶:PWM速度跟随输出,拐角降速,有效解决拐角堆胶问题。
作为一家专业的视觉点胶软件系统方案供应商,我们一直在不断地更新和完善产品,力图让点胶软件更简单、更好用。1、视觉智能定位纠正,一键标定,自动对针。2、可根据dxf工艺文件生成加工轨迹,无需示教。3、可保存产品轨迹模板,再次生产时,只需要调用模板预案即可。4、无需定位模具,视觉自动识别产品位置、角度、不同产品。5、具有点、线、面、弧、圆和不规则曲线连续补间等功能,能适应任何不规则物件点胶。6、胶量大小粗细、涂胶速度、点胶时间、停胶时间皆可参数设定;7、简单易学,初学者也能快速上手。8、用途广:可用于点胶机、灌胶机、点钻机、点漆机。9、技术服务:1小时内售后响应,提供调机和培训,终身软件维护。自动化点胶软件主要由视觉软件模拟人工代替传统点胶。
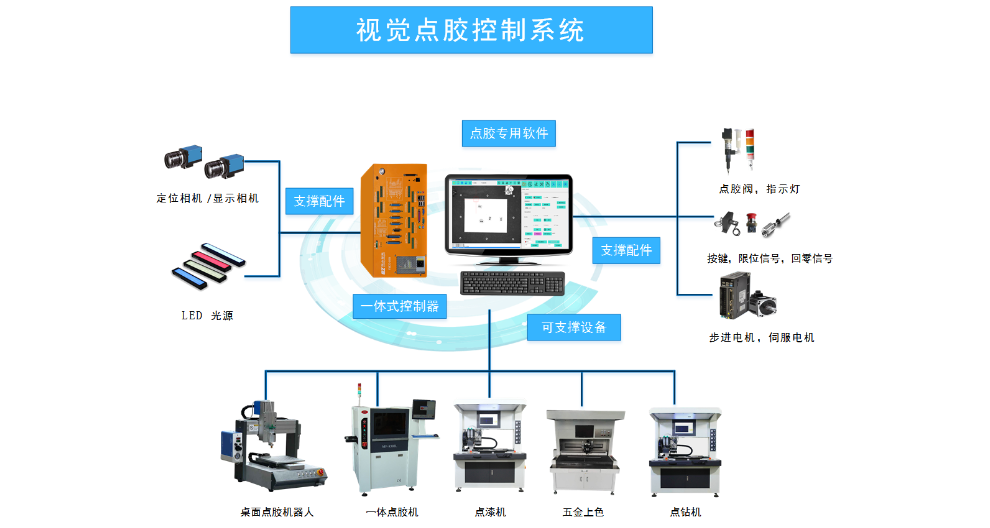
点胶机器人必不可少的三大软件是:执行机构、驱动机构和控制软件:点胶机器人的执行机构主要负责执行点胶作业,驱动机构能够帮助执行机构更精确,更高质的实现点胶,而这些当然还有赖于科学、合理的控制软件。执行机构由机械手和躯干两部分构成。机械手在作业过程中都是的呈直线运作。为了配合机械手的运作,一般选用所谓直线液压缸、摆动液压缸、电液脉冲马达、伺服液压马达、交流伺服电动机、直流伺服电动机以及步进电动机等执行机构。点胶机器人的躯干是点胶机器人的主体部分,包括安装手臂、动力源、各种执行机构的支架等都属于点胶机器人的躯干范畴。驱动装置是点胶机器人的二大组成部。驱动机构主要有四种:液压驱动、气压驱动、电气驱动以及机械驱动。其中只电气、气动驱动凭借着用胶量相对较少,气源方便,保养简单方便,且费用相对较低的优势占了总应用的百分之九十然后要说的就是控制软件。为了保证点胶操作简单更加,高速精确。点胶机的控制软件配备了一体化控制器、相机、镜头、光源、IO驱动板、点胶软件等一整套解决方案。单工位全景视觉点胶软件。深圳双工位视觉点胶软件有哪些厂商
视觉智能点胶软件根据胶水的特点增加了定制工艺算法,实现了精确的点胶、涂覆加工。北京桌面点胶软件控制系统
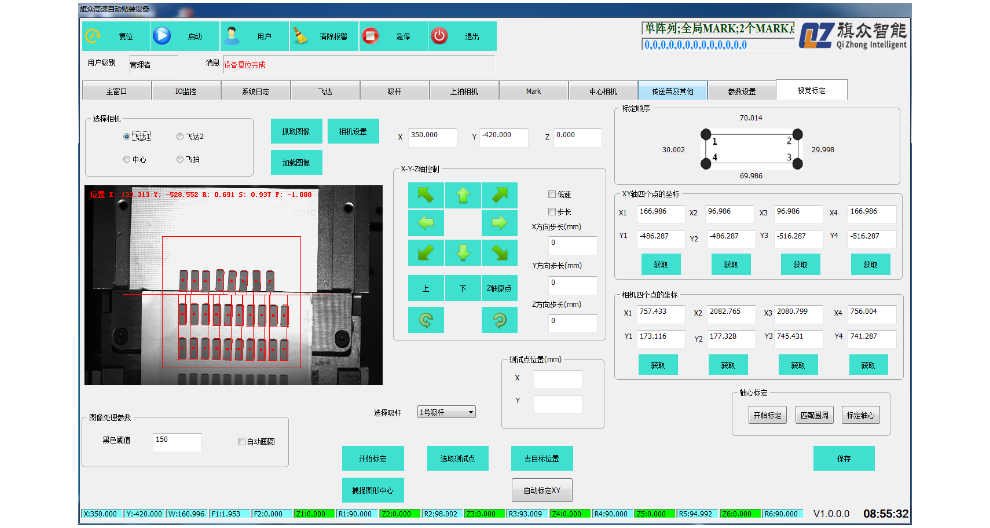
点胶软件视觉定位的原理: 点胶软件视觉定位主要包含定位方法、图像处理、测量软件的标定、误差分析这四部分。点胶软件视觉定位的原理:通过机器视觉对点胶位置进行自动检测,主要分为图像采集、图像处理和位置坐标的提取与输出三个部分。启动点胶加工时,相机按照点胶区域的图像进行采集,并将采集到的图像存储于工控机(IPC)内存中。当图像采集完毕,IPC一次对所采集到的图像进行处理,拟合出点胶区域轮廓的几何特征。然后,依据胶点中心与点胶区域轮廓的位置特征,提取胶点中心的坐标数值,并通过IPC传输给机电执行机构,驱动运动平台移动到正确的点胶位置。胶点中心位置的识别通常需要根据给定条件或者点胶区域轮廓的几何特征来进行。北京桌面点胶软件控制系统
深圳市旗众智能科技有限公司是一家国家高新科技企业,位于深圳龙岗区宝龙街道智慧家园,是运动控制解决方案的前列供应商。旗众智能专注于制造装备的“大脑”—运动控制系统,工业自动化设备的“眼睛”—机器视觉系统,以及控制系统应用平台开发,公司自成立之初就立志做中国自动化行业的“安卓”系统,为设备制造商提供比较好的运动控制产品及方案。旗众智能汇聚了一批高素质、高水平、年轻、具有实干精神的高学历人才,拥有博士和硕士以上学历的占员工总数的40%。与华南理工大学有着密切的合作。公司通过自主研发一直保持稳步快速的发展,拥有自主为主技术,多次获得发明专利、实用新型专利以及软件著作权等证书,走在行业的较前端。