-
山东安全巡检机器人导轨滑触功能
廊道巡检机器人在功能设计中,实时数据交互占据重要地位,促使机器人与监控中心保持持续双向通信,增强巡检的智能化水平。机器人配备多种传感器,持续监测输煤廊道的温度、粉尘浓度及异常声响,同时利用高清摄像头记录设备运行和现场情况。采集的数据通过无线网络实时传输至监控平台,监控人员基于这些信息调整巡检路径和任务优先级,确保关键区域得到有效覆盖。数据...
查看详细 >>10 2025-11 -
上海电气房轨道巡检机器人远程控制工作原理
全天候地面轮式巡检机器人设计旨在实现无人值守环境下的智能巡检,适用于煤矿、发电厂及石化等复杂工业场所。用户通过智能任务规划系统设定巡检路线和任务优先级,机器人自动执行预定计划,支持定时和周期性巡检,确保设备状态持续监测。装备的多传感器集成可见光、红外、气体和噪声检测功能,能够在各种天气和地形条件下稳定采集环境与设备数据。遇到障碍时,机器人...
查看详细 >>10 2025-11 -
河北室内轮式升降巡检机器人煤矿工作原理
激光扫描仪作为盘煤巡检机器人的关键传感器,赋予其高精度测绘与定位能力。借助三维激光导航传感器,机器人能够构建包含整个料场的三维导航地图,提升路径规划的智能化水平。激光扫描技术不仅捕捉煤堆表面形态的细节,还能实时反映体积变化,辅助库存管理和调度。与人工巡检相比,激光扫描结合机器人自动巡检可持续采集大量精确数据,减少测量偏差和盲区。融合红外测...
查看详细 >>10 2025-11 -
陕西安全巡检机器人装置信号灯
局部放电检测是电气设备维护中的关键环节,尤其适用于电气房这种设备密集且环境复杂的场所。轨道巡检机器人搭载高灵敏度局部放电传感器,能够持续捕获设备内部微弱放电信号,这些信号通常预示绝缘性能下降或潜在故障。与传统人工巡检相比,机器人实现全天候自动监测,确保对设备健康状况的掌握。局部放电检测不仅有助于及时发现绝缘缺陷,还能降低因放电引发的设备击...
查看详细 >>10 2025-11 -
河南室内轮式升降巡检机器人温湿度检测的作用
将粉尘浓度维持在安全阈值以内,是煤矿及燃煤电厂输煤廊道安全管理的一项必要组成部分。粉尘廊道巡检机器人集成了多种传感器模块,能够精确采集环境中的细颗粒物浓度。关键组件包括高精度PM2.5传感器,配合温湿度传感器和气体检测模块,形成对空气质量的监控。机器人搭载的高清摄像头和红外热像仪辅助识别粉尘堆积及设备表面温度异常,便于排查火灾隐患。定位传...
查看详细 >>10 2025-11 -
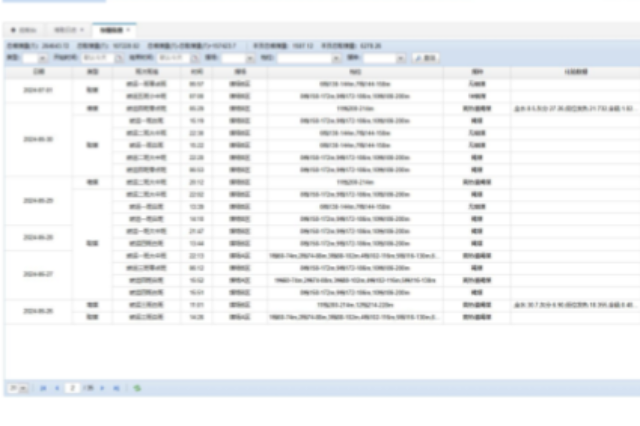
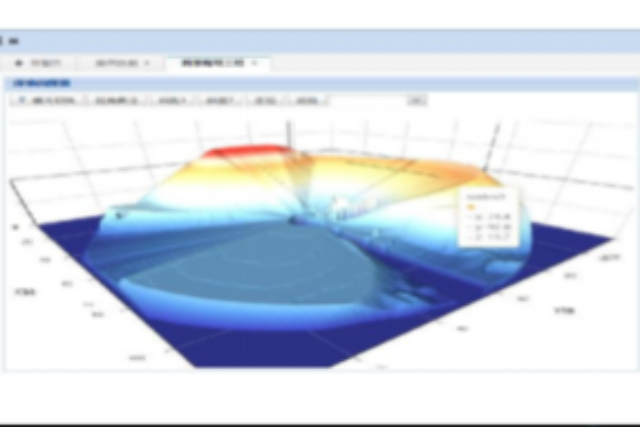
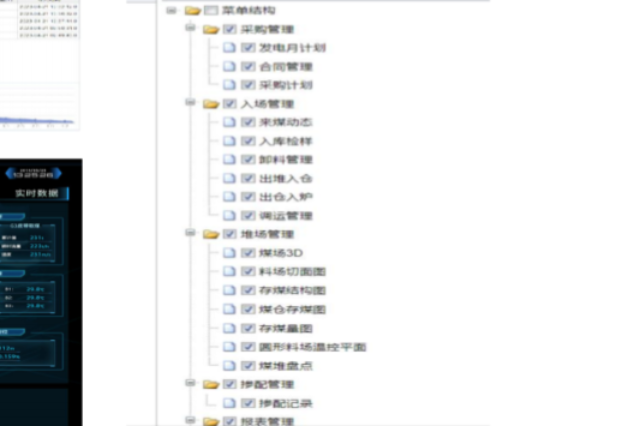
温度监控参数数字煤场管控系统
在操作大型料场数字煤场管控系统时,用户需遵循系统设计的业务流程,有序完成进煤、耗煤和存煤管理。系统界面集成三维立体煤场图形,便于用户直观掌握各存煤分区的堆煤量及状态。操作流程始于卸煤登记,录入卸煤量、卸煤点和煤质暂估信息,系统随即更新存煤数据并调整成本核算。耗煤环节中,操作人员根据发电计划录入用煤量和掺烧情况,库存成本同步更新。存煤管理则...
查看详细 >>10 2025-11 -
陕西智能巡检系统安防应用效果
全天候地面轮式巡检机器人设计旨在实现无人值守环境下的智能巡检,适用于煤矿、发电厂及石化等复杂工业场所。用户通过智能任务规划系统设定巡检路线和任务优先级,机器人自动执行预定计划,支持定时和周期性巡检,确保设备状态持续监测。装备的多传感器集成可见光、红外、气体和噪声检测功能,能够在各种天气和地形条件下稳定采集环境与设备数据。遇到障碍时,机器人...
查看详细 >>10 2025-11 -
河北堆取料机无人值守系统自动取料控制台
大型料场中,堆取料机的作业效率与安全性密切相关,实时扫描技术在这一过程中发挥了重要作用。通过在设备上安装激光扫描仪,系统能够对料堆进行精确的三维扇形扫描,捕捉料堆的边缘以及起止位置,动态反映料堆形态的变化。这种扫描装置通常采用挑空垂直向下安装方式,既减少了盲区,也便于维护,延长了设备使用寿命。采集到的扫描数据经过处理后,转化为三维图像和料...
查看详细 >>10 2025-11 -
上海堆取料机无人值守系统条形的组成
回转堆取料机无人值守系统的软件架构聚焦于实现自动化堆取料作业的基础支撑。设计上采用面向对象方法,基于客户端-服务器结构开发,使用C++语言编写,运行于Windows平台。三维图形部分依托OpenGL图形库完成,确保模型渲染效率和动态响应。系统通过TCP/IP Socket实现与激光扫描设备的实时数据交互,GPS和角度位移编码器通过以太网接...
查看详细 >>10 2025-11 -
河北堆取料机无人值守系统GPS的作用
图像技术在散货堆场堆取料机无人值守系统中发挥着重要作用,成为智能堆取料的基础支撑。系统通过堆取料机上安装的高清红外摄像机,采集现场实时视频,结合激光扫描仪获取的三维料堆数据,构建多维度作业信息。图像数据经中控系统处理后,不仅用于设备运行状态监控,还辅助分析料堆形态变化,支持堆料和取料路径的动态调整。数字图像与三维仿真模型相结合,实现料堆的...
查看详细 >>10 2025-11 -
北京堆取料机无人值守系统一体化的功能
操作控制台在无人值守堆取料系统中扮演关键角色,集成了操纵杆、按钮、选择开关及高清显示器,便于操作人员实时监控设备运行状况。多工位设计支持同时处理多项任务,使得设备状态、故障报警及作业进度信息一目了然。工程师负责系统配置、程序调整及故障排查,保障系统的稳定性。控制台通过高速网络与中控系统及机载PLC保持通信,确保指令准确传达并及时反馈设备状...
查看详细 >>09 2025-11 -
河南堆取料机无人值守系统料位检测实时控制
激光扫描技术在圆形堆取料机无人值守系统中承担着关键的测绘任务。通过在堆料机悬臂的两侧配置高精度激光扫描仪,系统能够以扇形扫描的方式迅速捕获料堆的三维数据。这些扫描数据涵盖了料堆的边界形状、堆积角度及高度等重要几何信息,同时能够反映料堆形态的实时变化,辅助实现取料位置的准确确定。采用垂直向下的安装架构,有效减少了扫描盲区,提升了测量的稳定性...
查看详细 >>09 2025-11